Introduction to Point Cloud Models and Pick Points
Before you learn how to create a point cloud model and add pick points, you need to understand what a point cloud model and pick points are, and the role they play in the matching process.
What Is Point Cloud Model
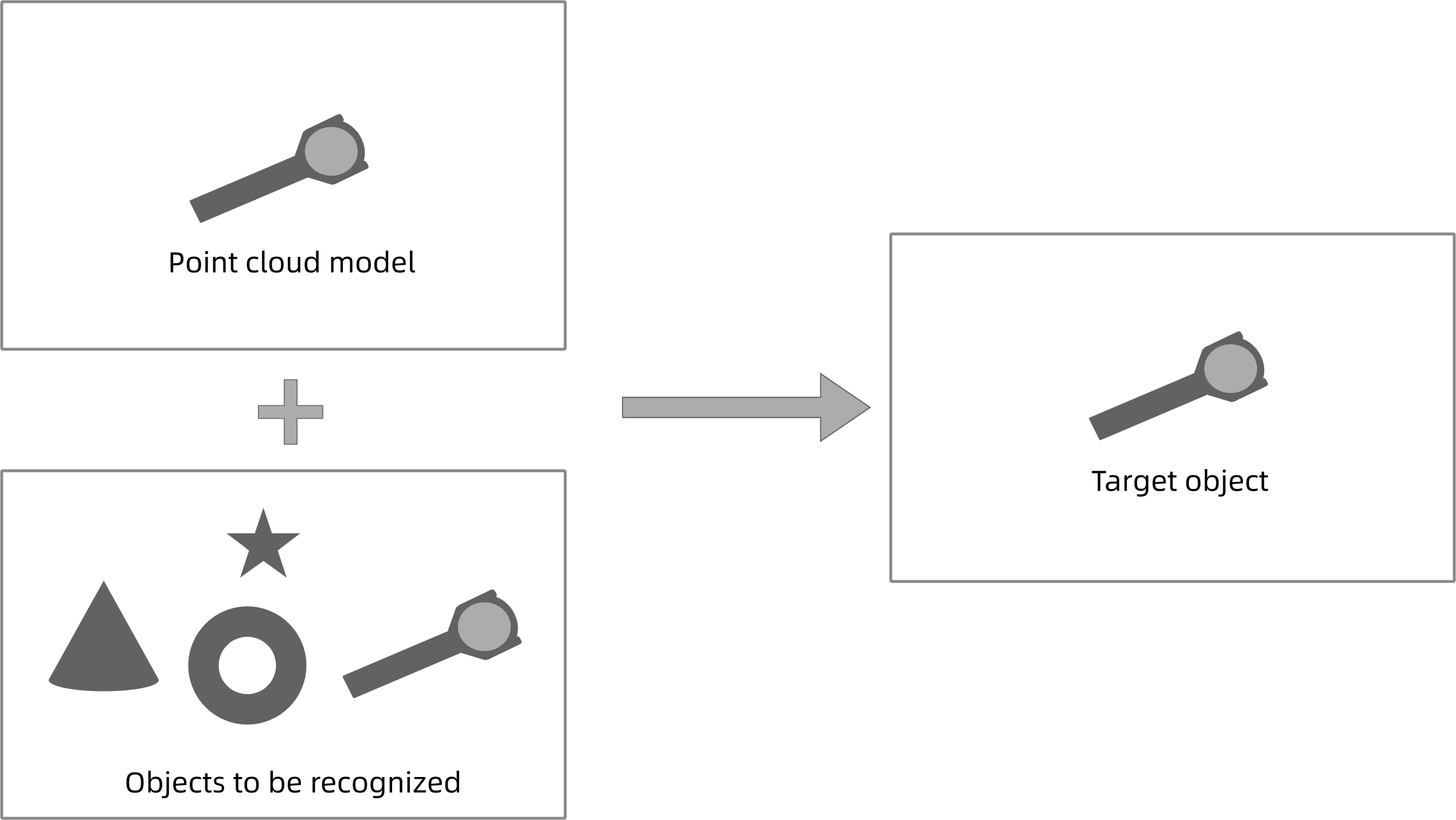
In the matching process, a point cloud model refers to a predefined point cloud that reflects the shape, structure, and features of the target object. It is used to match with the input point cloud, find the best correspondence, and ultimately identify the target object.
In the illustration below, the target object is identified by matching the point cloud model with the objects to be recognized.
A point cloud model can represent the entire object or just a part of it. To ensure efficient matching, the point cloud should meet the following requirements:
-
The point cloud model should have a sufficient number of points, which are evenly distributed to guarantee the matching speed.
-
The point cloud model should reflect typical features of the target object to ensure accurate recognition during matching.
-
The point cloud model should not contain interfering point clouds to ensure the stability and accuracy of matching.
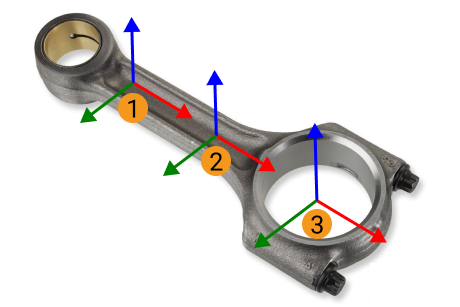
What Is Pick Point
A pick point is the position on the object that can be gripped by the robot. The pick point is defined in the object reference frame. Its position and orientation are relative to the target object.
A target object can have multiple pick points located inside, on the surface of, or near the point cloud of the target object, as shown below.