Other Issues
This section covers other issues you may encounter regarding target object recognition and gives instructions on how to fix them.
How to ensure that the X-axis orientation of the pose of a symmetric object is consistent with that of the point cloud model?
-
For objects with circular symmetry, such as rings, the following settings are required.
-
You do not need to set symmetry under “Point cloud model settings” in the target object editor. In other words, simply disable the Configure point cloud model option.

-
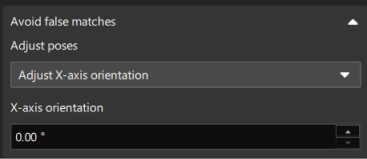
In the “Target object selection and recognition” process of the “3D Target Object Recognition” tool, enable Advanced mode and configure the following settings under “Avoid false matches.” X-axis orientation is 0, indicating that the target direction is the X-axis direction of the pose of the point cloud model.
-
-
For objects without circular symmetry, such as rectangular objects with 180-degree rotational symmetry, the following settings are required.
-
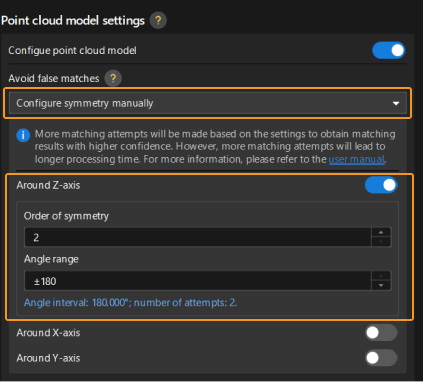
Under “Point cloud model settings” in the target object editor, set “Avoid false matches” to Configure symmetry manually. Then, enable Around Z/Y/X-axis and set Order of symmetry and Angle range.
-
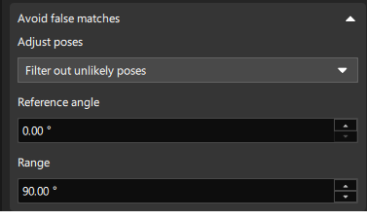
In the “Target object selection and recognition” process of the “3D Target Object Recognition” tool, enable Advanced mode and configure the following settings under “Avoid false matches.” A Reference angle of 0° represents that the target direction is the X-axis direction of the pose of the point cloud model. The Range should be set to half of the rotational symmetry angle. For example, if the angle of rotational symmetry for an object is 180°, the range should be set to 90°.
-