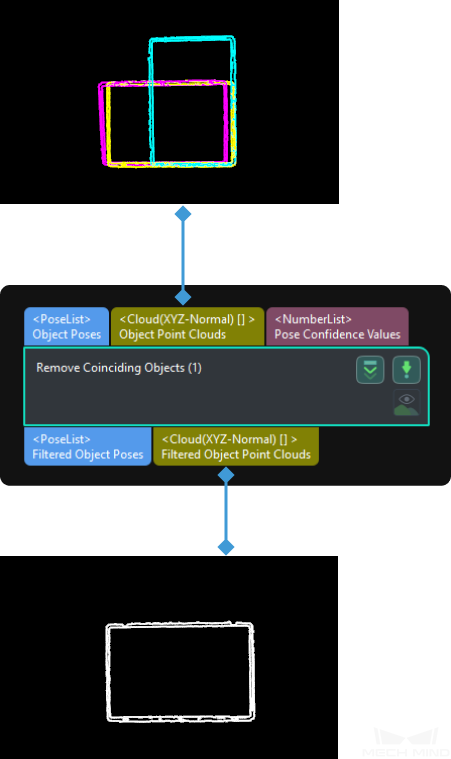
Remove Coinciding Objects
Function
Remove objects that are completely covered or covered by other objects according to the pose confidence values.
Usage Scenario
This Step is usually used after the Step 3D Fine Matching Lite (recommended) or the Step 3D Fine Matching to remove incorrect matching results.
Parameter Description
- Parameter Tuning Level
-
Description: This parameter is used to set the tuning level of the parameters. The parameters in different tuning levels are different.
Value list: Basic, Advanced
Instruction: If the Parameter Tuning Level is set to Basic, please complete parameter settings under “Object Model Type” and “Threshold Setting.” If the Parameter Tuning Level is set to Advanced, parameter settings under Advanced Settings will also need to be configured.
Object Model Type
- Object Model Type
-
Description: This parameter is used to select the type of the object’s point cloud model.
Value list: Surface model, Edge model
Instruction: Select the type of the point cloud model according to the actual requirements. If Edge model is selected, please input the scene point cloud that represents the entire surface of the object instead of the scene point cloud that represents the extracted edges only.
Threshold Setting
- Coincidence Ratio Threshold
-
Description: This parameter is used to set the threshold of the coincidence ratio between the object and another object. When the coincidence ratio is above this value, the objects with lower pose confidence will be judged as coinciding objects.
Default value: 30%
Advanced Settings
- Method to Generate Pixel Size
-
Description: When the coincidence ratio is calculated based on the 2D orthographic projection of the object point cloud, this parameter is used to select the method to generate the size per pixel on the projected 2D image.
Value list: Auto, Manual
-
Auto: Automatically determine the size per pixel on the projected 2D image.
-
Manual: Set the Pixel Size manually.
Instruction: If the “Method to Generate Pixel Size” is set to “Auto,” the input point clouds must belong to the same object type. This feature does not support inputting point clouds of different object types. If the input point clouds belong to different object types, please select “Manual” in the “Method to Generate Pixel Size.”
-
- Pixel Size
-
Description: Set the “Pixel Size” in millimeters.
Default value: 2.5 mm
Instruction: It is recommended to set the “Pixel Size” the same as the “Sampling Interval” when making the point cloud model. If the value is set too large, the accuracy of the calculated coincidence ratio may be reduced. If the value is set too small, the calculated coincidence ratio may be lower.