Sort 3D Poses V2
Usage Scenario
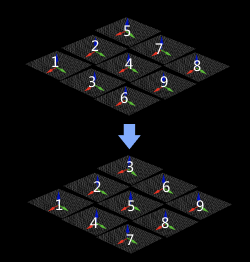
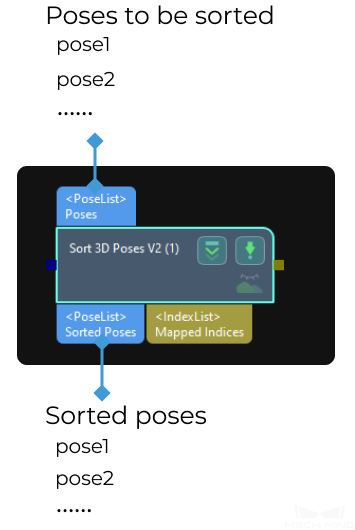
This Step sorts poses according to specified rules for subsequent pose processing or picking strategy.
Parameters
This Step provides eleven methods to sort poses. The detailed description is as follows.
Sort by None
Parameters
- Show Point Cloud in Selected Frame
-
Parameter description: This parameter is used to select the reference frame that display the point cloud.
Value list: Robot Coordinate, Camera Coordinate.
Default value: Robot Coordinate.
Tuning instruction: Select this parameter according to actual situation.
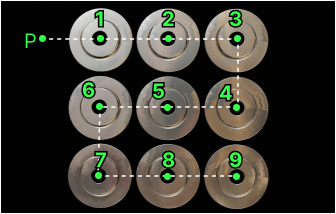
Sort by S shape on plane
Description
Sort the poses in rows and columns based on the given reference pose (with priority given to sorting poses according to “Row Direction”). This method is usually used for unloading neatly arranged workpieces or depalletizing.
Parameters
- Row direction
-
Parameter description: This parameter is used to set the row direction when the poses are sorted on the plane.
Value list: Positive X-direction, Positive Y-direction, Positive Z-direction, Negative X-direction, Negative Y-direction, Negative Z-direction.
Default value: Positive X-direction.
- Column direction
-
Parameter description: This parameter is used to set the column direction when the poses are sorted on the plane.
Value list: Positive X-direction, Positive Y-direction, Positive Z-direction, Negative X-direction, Negative Y-direction, Negative Z-direction.
Default value: Positive Y-direction.
- Row Interval
-
Parameter description: This parameter is used to set the interval (in mm) between rows when the poses are sorted on the plane.
Default value: 100.000 mm
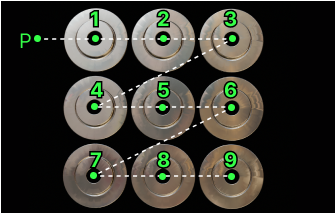
Sort by Z shape on plane
Description
Sort the poses in rows and columns based on the given reference pose (with priority given to sorting poses according to “Row Direction”). This method is usually used for unloading neatly arranged workpieces or depalletizing.
Parameters
- Row direction
-
Parameter description: This parameter is used to set the row direction when the poses are sorted on the plane.
Value list: Positive X-direction, Positive Y-direction, Positive Z-direction, Negative X-direction, Negative Y-direction, Negative Z-direction.
Default value: Positive X-direction.
- Column direction
-
Parameter description: This parameter is used to set the column direction when the poses are sorted on the plane.
Value list: Positive X-direction, Positive Y-direction, Positive Z-direction, Negative X-direction, Negative Y-direction, Negative Z-direction.
Default value: Positive Y-direction.
- Row Interval
-
Parameter description: This parameter is used to set the interval (in mm) between rows when the poses are sorted on the plane.
Default value: 100.000 mm
Sort by X value of pose
Sort by Y value of pose
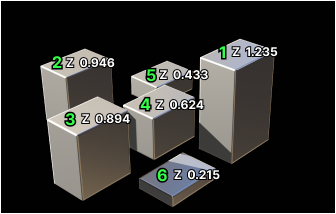
Sort by Z value of pose
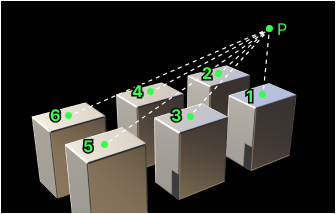
Sort by Distance from pose to reference pose
Sort by Distance from pose to reference pose on XOY plane

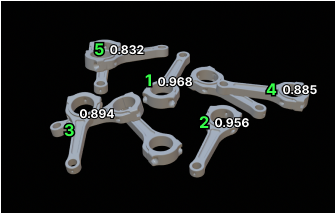
Sort by Pose confidence values
Sort by Projection of pose in reference direction
Description
Project the pose onto the axes of the reference pose, calculate the projection distance, and then sort the poses according to the distance.
Parameters
- Ascending
-
Parameter description: Once this option is selected, the poses will be sorted in order of projection distances from shortest to longest.
Default value: selected.
- Reference direction
-
Parameter description: This parameter is used to select the axis of the reference pose and its direction used for pose projection.
Value list: Positive X-direction, Positive Y-direction, Positive Z-direction, Negative X-direction, Negative Y-direction, Negative Z-direction.
Default value: Positive X-direction.