Select Proper Hand-eye Calibration Process
Hand-eye calibration establishes the transformation relationship between the camera and robot reference frames. With this relationship, the object pose determined by the vision system can be transformed into that in the robot reference frame, which guides the robot to perform its tasks. The accuracy of hand-eye calibration results affects the accuracy of robot picking.
After the Mech-Mind Vision System is constructed, you can start the hand-eye calibration. In addition, you need to perform hand-eye calibration again in any of the following conditions:
-
The camera moves in reference to the robot base (camera mounted using the Eye to Hand method) or flange (camera mounted using the Eye in Hand method).
-
The camera is replaced.
-
The robot is replaced.
Select the Proper Calibration Process
The calibration procedures are affected by robot communication modes, camera mounting modes, calibration modes, and calibration data collection methods. Mech-Vision provides standardized calibration procedures for various scenarios, helping you calibrate the camera intrinsic and extrinsic parameters quickly and accurately.
|
For explanations of the robot communication modes, camera mounting modes, calibration modes, and calibration data collection methods, refer to the section Calibration-related Concepts. |
Please follow instructions in this section to select the proper calibration process.
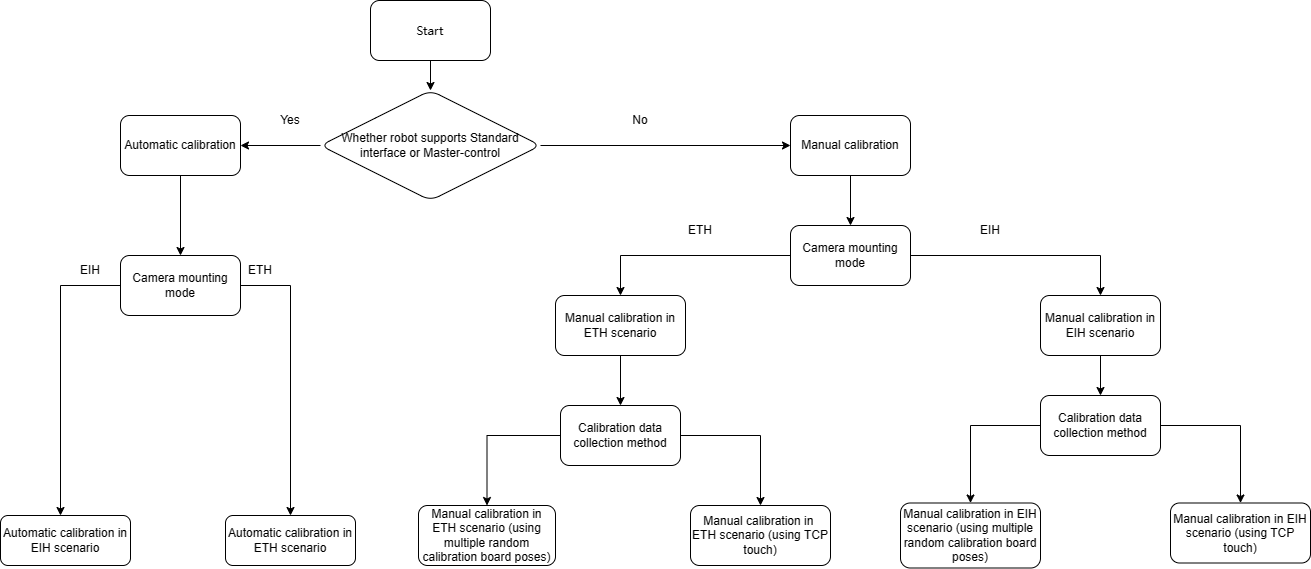
-
Confirm whether the robot supports communication using Standard Interface or Master-control.
-
If yes, choose automatic calibration and proceed to Step 2.
-
If no, choose manual calibration and proceed to Step 3.
-
-
Confirm the camera mounting mode for automatic calibration.
-
If the camera mounting mode is Eye to Hand (ETH), select automatic calibration in the ETH scenario.
-
If the camera mounting mode is Eye in Hand (EIH), select automatic calibration in the EIH scenario.
-
-
Confirm the camera mounting mode for manual calibration.
-
If the camera mounting mode is ETH, confirm the calibration data collection method.
-
If the calibration data collection method is multiple random calibration board poses, select manual calibration in the ETH scenario (using the multiple random calibration board poses method).
-
If the calibration data collection method is TCP touch, select manual calibration in the ETH scenario (using the TCP touch method).
-
-
If the camera mounting mode is EIH, confirm the calibration data collection method.
-
If the calibration data collection method is multiple random calibration board poses, select manual calibration in the EIH scenario (using the multiple random calibration board poses method).
-
If the calibration data collection method is TCP touch, select manual calibration in the EIH scenario (using the TCP touch method).
-
-
If two cameras are used in a project, please perform calibration by referring to the section Hand-Eye Calibration in the Eye to Eye Scenario. If a truss robot is used in a project, please perform calibration by referring to the section Hand-Eye Calibration for Truss Robots.