Transform Point Clouds
Function
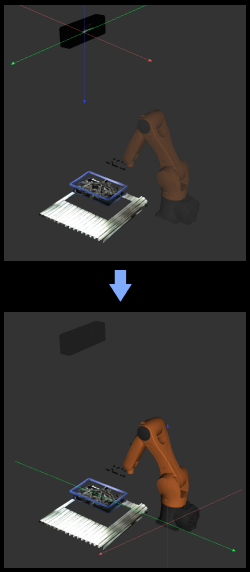
This Step can transform point clouds from one reference frame to another, or transform within its own reference frame according to the reference pose.
Usage Scenario
This Step is usually used to transform point clouds between camera reference frame and robot reference frame.
If you are using a truss robot, please use the Transform Point Clouds for Truss Step.
Parameter Description
Transformation Settings
- Transformation Type
-
Parameter description: This parameter is used to select the type of point cloud transformation.
Default setting: CameraToRobot.
Options: CameraToRobot, RobotToCamera, AllWithFirst, FirstWithAll, UseCorrespondenceInput, and AffineTransform.
Instructions:
-
CameraToRobot: Transform the point clouds from the camera reference frame to the robot reference frame. Please refer to the tuning example for the corresponding result.
-
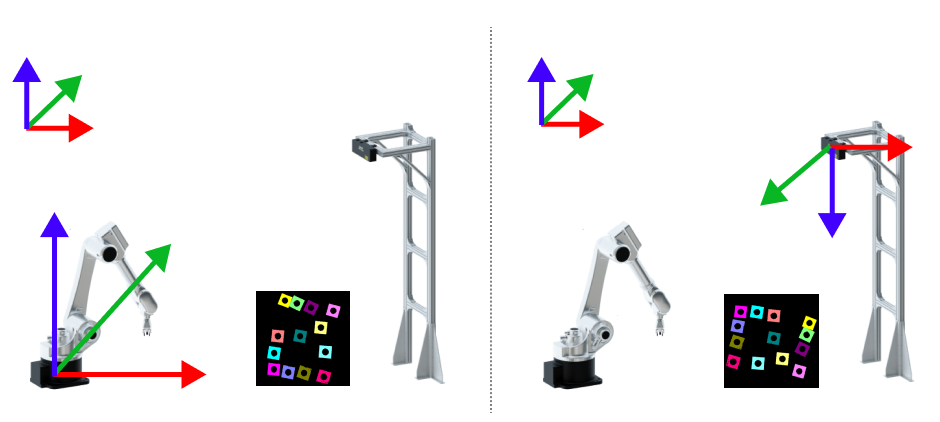
RobotToCamera: Transform the point clouds from the robot reference frame to the camera reference frame. Please refer to the tuning example for the corresponding result.
-
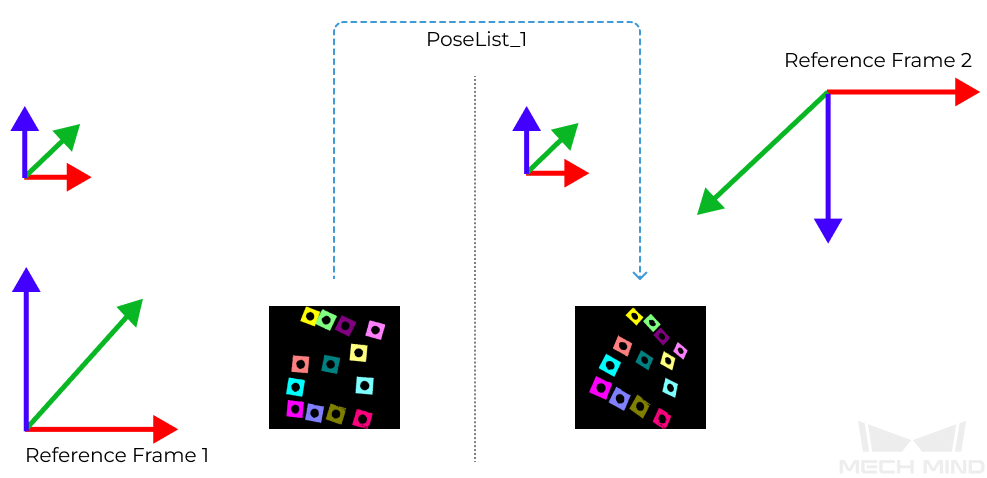
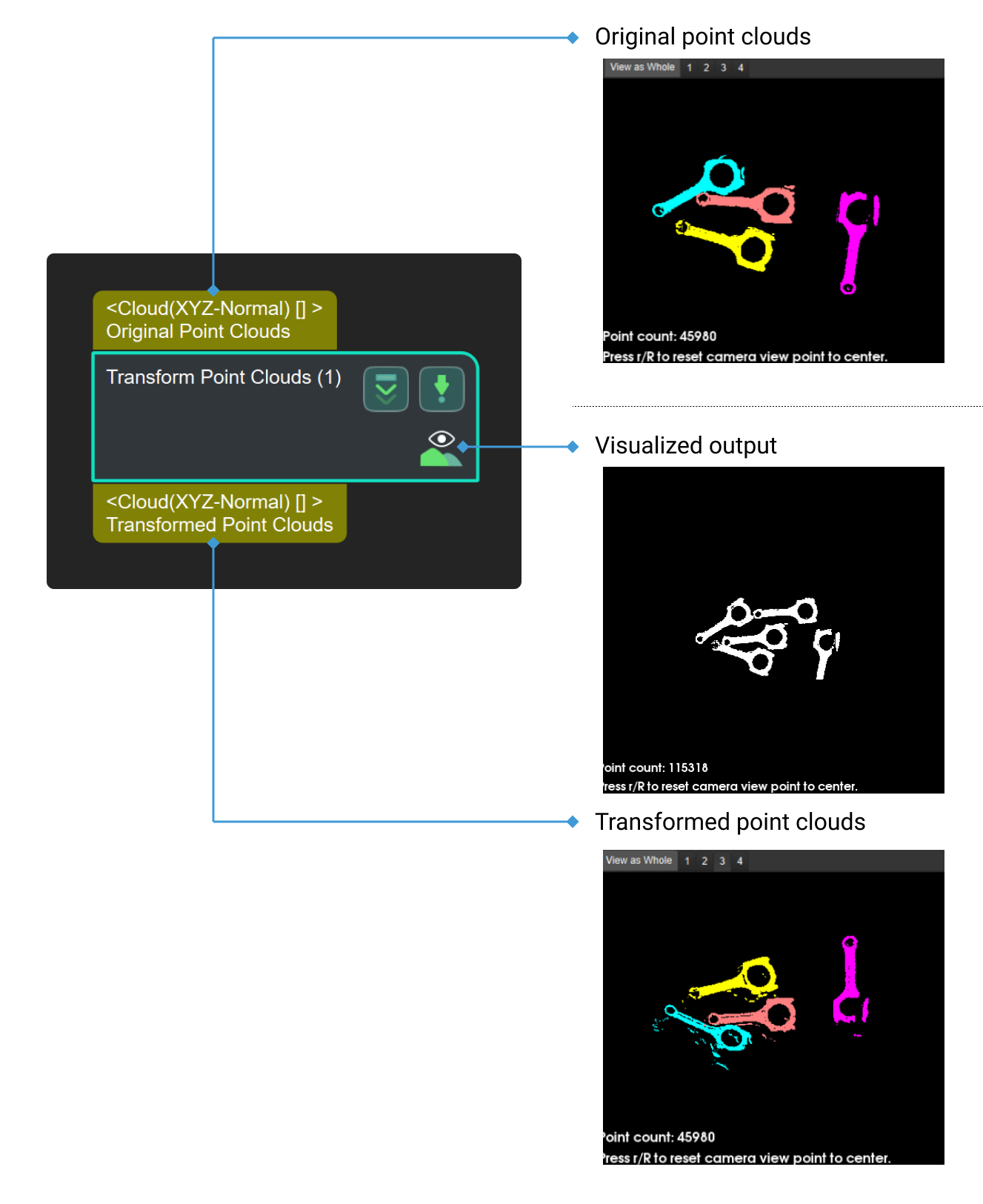
AllWithFirst: Transform the original point clouds to another reference frame according to the first reference pose input. Please refer to the tuning example for the corresponding result.
-
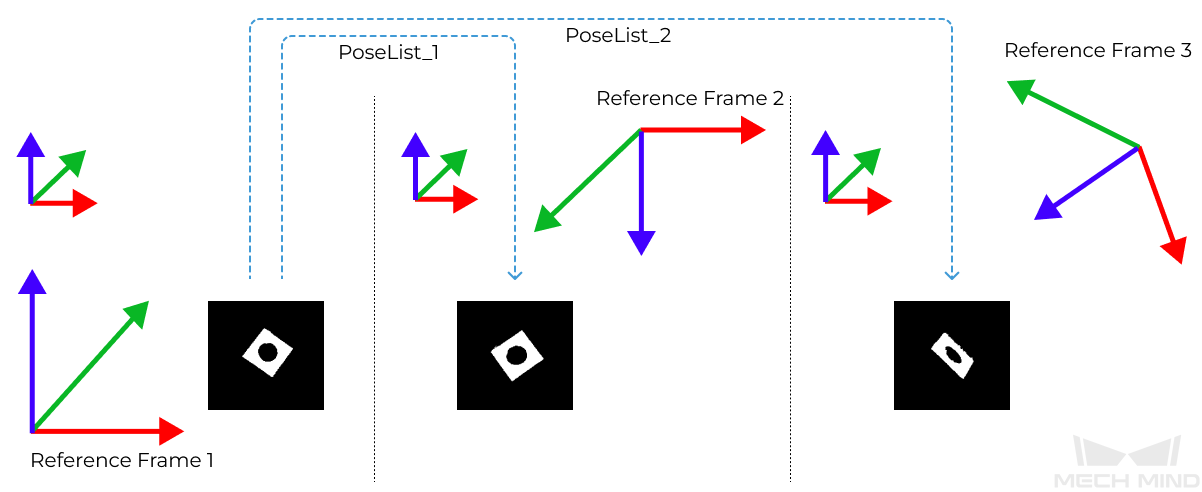
FirstWithAll: Transform the first original point clouds input to another reference frame according to reference poses in the reference pose list which should be input. Please refer to the tuning example for the corresponding result.
-
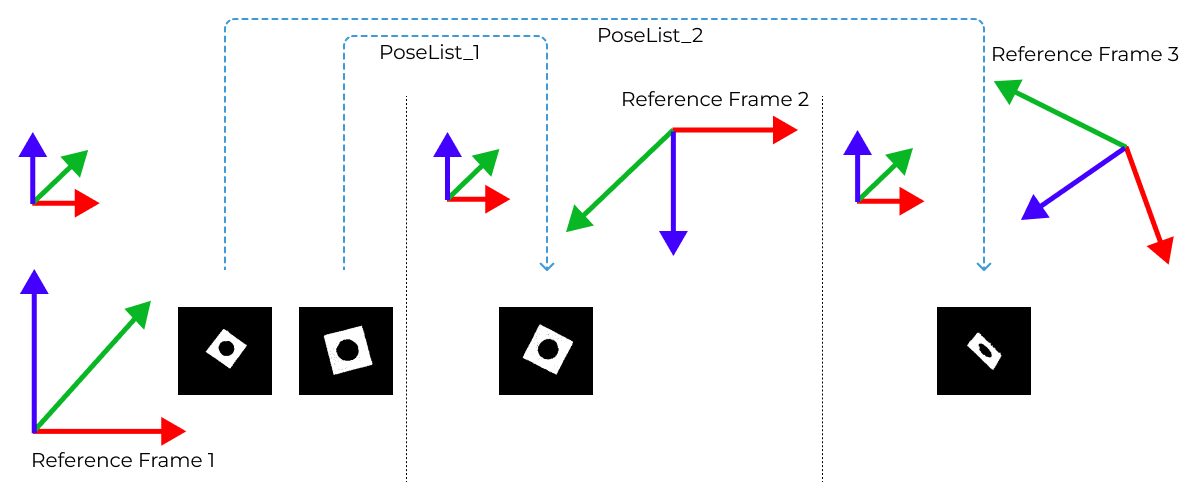
UseCorrespondenceInput: Transform the original point clouds to another reference frame according to the corresponding reference poses respectively. Please refer to the tuning example for the corresponding result.
-
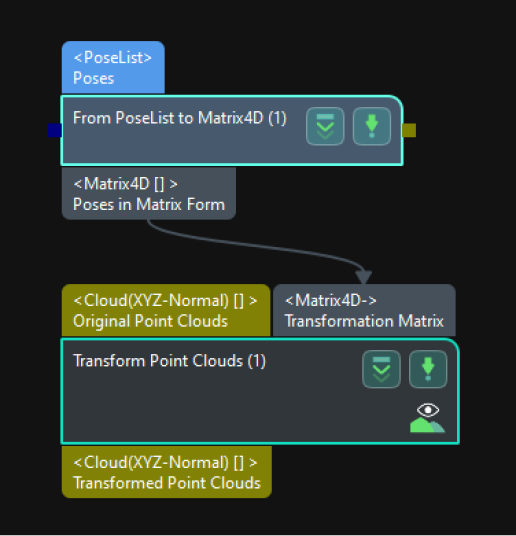
AffineTransform: Transform the point clouds with an affine matrix. The pose list should be converted to matrix4D format with the Step From PoseList to Matrix4D first and then input. Please refer to the tuning example for the corresponding result.
-
Tuning Examples
CameraToRobot
The following figure shows the results before (left) and after (right) point cloud transformation of CameraToRobot.
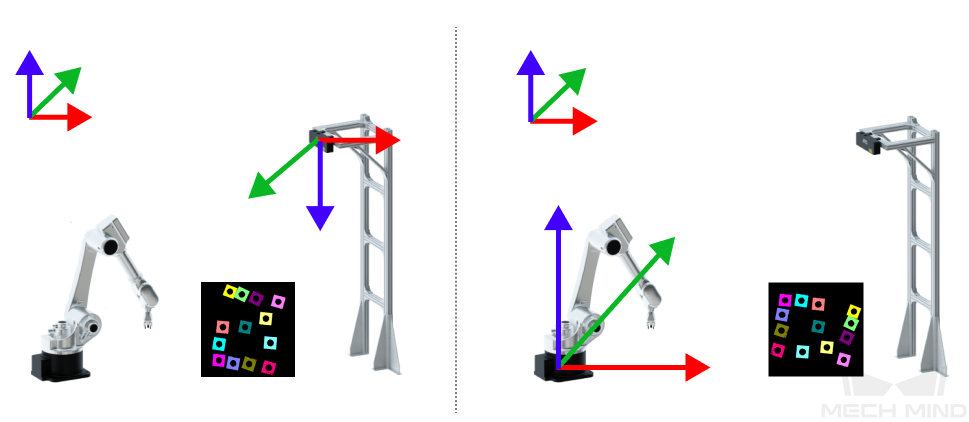
CameraToRobot
The following figure shows the results before (left) and after (right) point cloud transformation of RobotToCamera.
AllWithFirst
The following figure shows the results before (left) and after (right) point cloud transformation of AllWithFirst.