Configure Modbus TCP Communication
This section introduces how to configure the Modbus TCP communication. Before configuration, please confirm that you have already selected the robot and entered the Communication Option interface.
-
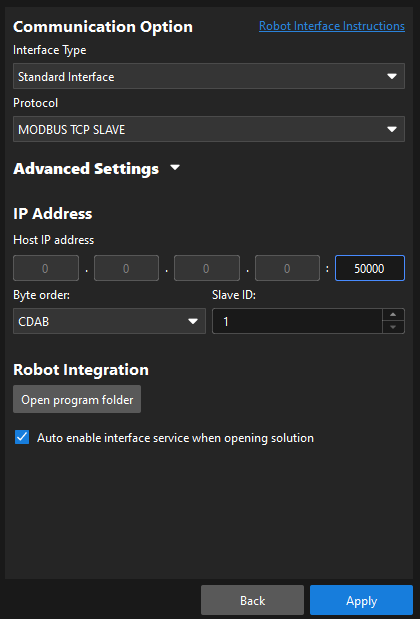
On the Communication Option interface, set the Set Interface Type parameter to Standard Interface, and set the Protocol parameter to MODUBS TCP SLAVE.
-
In the IP Address region, set the parameters as follows.
-
Enter the port of the host (Modbus TCP slave). The port number should be set to 50000 or larger.
-
Set the Byte order parameter. Set it based on the master device’s floating point byte order. For standard big-end data, select DCBA; for standard small-end data, select ABCD.
-
Set the Slave ID parameter.
-
-
(Optional) Select Auto enable interface service when opening solution. When the solution is opened, you do not need to start the interface service manually.
-
Click the Apply button.
Next, you need to complete the remaining standard interface configuration according to the used robot or PLC.