Calc Poses and Dimensions of Rectangles
Function
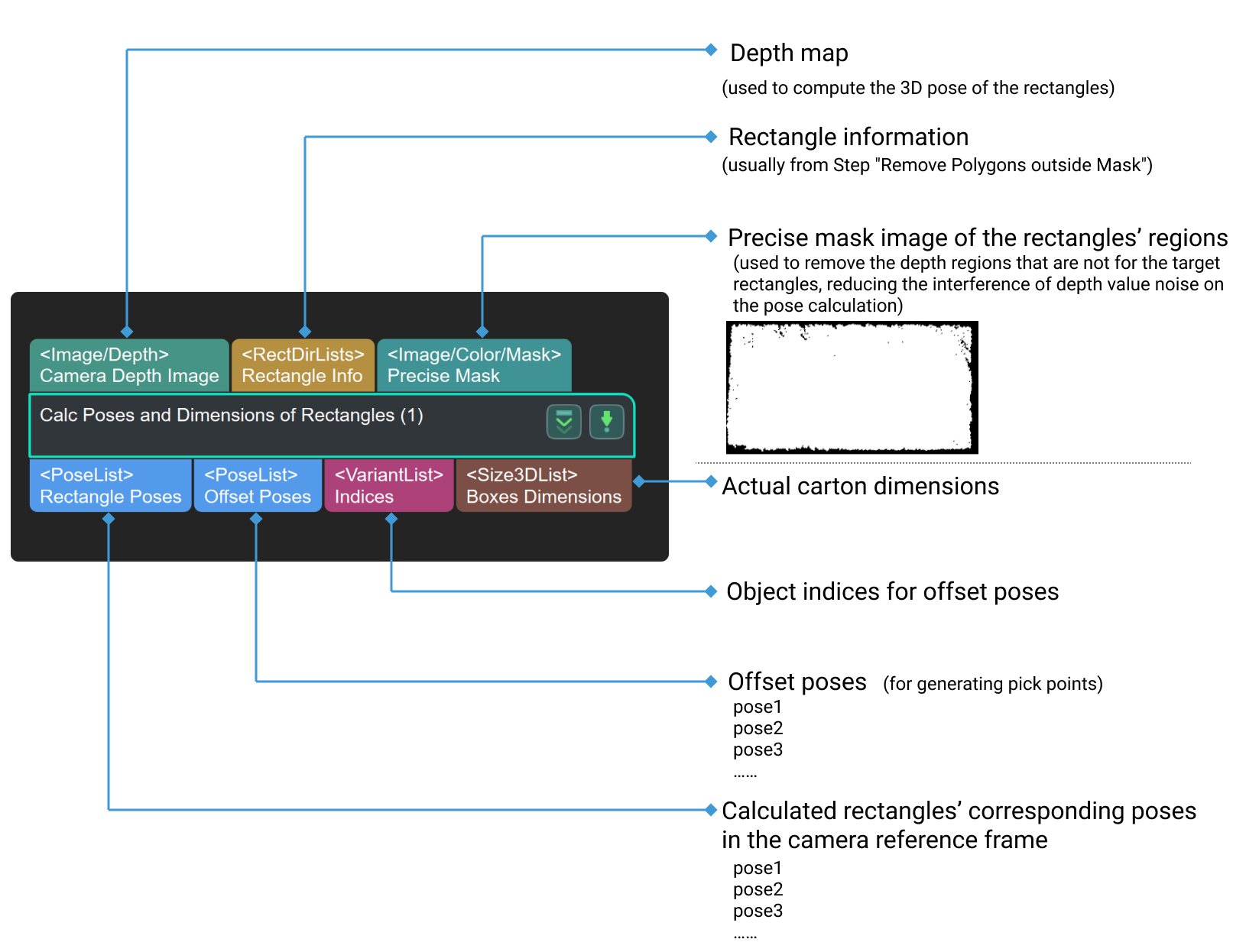
Calculate the corresponding poses of the rectangles in 3D space by the depth map and rectangle information.
Usage Scenario
Fixedly used with the Step Remove Overlapped Polygons to calculate the poses of the rectangular objects obtained by 2D Matching in the camera reference frame.
Parameters
Input Type
Parameter description: This parameter is used to determine the type of input.
Default value: Depth
List of values: Depth and VertexAndSize.
Tuning recommendation: Please set the value according to the actual situation.
Pose Calculation Settings
- Search Radius for Pose Z Value Calculation
-
Instruction: This parameter is used to adjust the search radius of the depth at a given position in the image (in pixels). The parameter is only valid when Input Type is set to Depth.
Default value: 20
Suggested value: 20
Valid range: [0, +∞)
Suction Cup Settings
- Suction Cup Length along X Axis
-
Instruction: This parameter is used to adjust the size of the area covered by the suction cup in X direction (in millimeters). When the size of the suction cup is smaller than the target object, the parameter should be decreased in order to avoid picking the adjacent objects.
Default value: 0
Suggested value: When the size of the suction cup is smaller than the target object, it is suggested to set the value to 0. If the size of the suction cup is larger than the target object, set the value according to its actual size.
Valid range: [0, +∞)
- Suction Cup Length along Y Axis
-
Instruction: This parameter is used to adjust the size of the area covered by the suction cup in Y direction (in millimeters). When the size of the suction cup is smaller than the target object, the parameter should be decreased in order to avoid picking the adjacent objects.
Default value: 0
Suggested value: When the size of the suction cup is smaller than the target object, it is suggested to set the value to 0. If the size of the suction cup is larger than the target object, set the value according to its actual size.
Valid range: [0, +∞)
- Suction Cup Overlap Ratio Limit on Other Box
-
Instruction: To avoid picking other non-target objects during the picking, this parameter sets the upper limit of the overlap ratio, which refers to the ratio of the suction cup’s part on other non-target box to the total area of the suction cup. When the overlap ratio of the suction cup is lower than the set limit, the picking will be performed; when the overlap ratio is higher than the set limit, the picking will NOT be performed.
Default value: 0.3000
Suggested value: Set the value according to your actual needs.
Output Pose Strategy
- Number of Poses to Output
-
Instruction: This parameter is used to set the number of the box’s pose output.
Default value: One
List of values: One and Multiple.
Suggested value: Set the value according to your actual needs.