JPs Constraint
Definition of Terms:
| Shoulder |
The relative positional relationship between the center of the wrist and Axis1. Axis1 refers to the rotation center axis of the robot axis 1. |
| Elbow |
Relative positional relationship between the wrist and lower arm, which refers to the line connecting the rotation centers of the robot axis 2 and axis 3. |
| Wrist |
Wrist refers to axis 5 of the robot. The negative wrist JPs suggests that the robot’s wrist can rotate in the negative direction. |
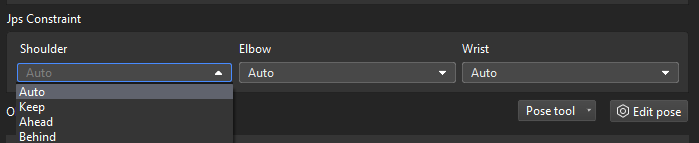
Options:
| Auto |
There is no constraints on the motion of this joint. The optimal solution is the one in which each axis rotates the least. |
| Keep |
Constrain the next JPs solution according to the current JPs status. For example, if the current JP of the axis 3 is positive, only solutions in which the JP of axis 3 is positive will be considered for the next waypoint. |
| Ahead |
The wrist center is ahead of axis 1. |
| Behind |
The wrist center is behind axis 1. |
After clicking  , a window showing all the JPs solutions to the current pose will pop up.
After clicking one of the solutions, the corresponding pose of the solution will be displayed in the 3D simulation area. Therefore, you will know the possible solutions under different constraints, as shown below.
, a window showing all the JPs solutions to the current pose will pop up.
After clicking one of the solutions, the corresponding pose of the solution will be displayed in the 3D simulation area. Therefore, you will know the possible solutions under different constraints, as shown below.
|