Array Gripper
At present, the array gripper mode only supports multiple end tools that are arranged in a single row.
Matching Condition
Array Gripper Matching Strategy
When “CheckPositionOnly” is selected, you can only adjust “Dist Threshold”. When CheckPositionAndOrientation” is selected, you can adjust both “Dist Threshold” and “Angle Threshold”.
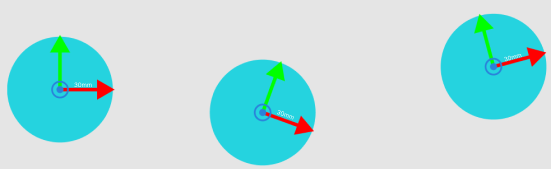
Dist Threshold
| Description |
The pick point will be within a circle with the object pose as the center and the set Dist Threshold as the radius. |
| Examples |
|

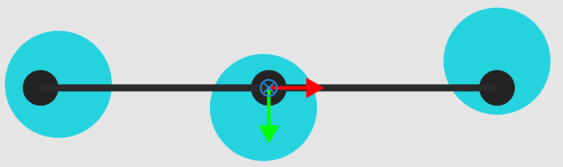
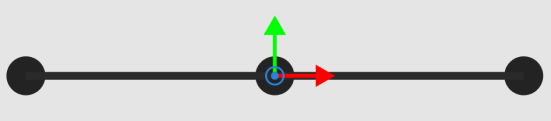
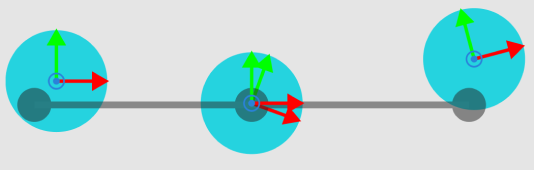
Angle Threshold
| Description |
The angle between the X-axis of the TCP and the X-axis of each workobject pose. |
| Examples |
|
Count of Picked Workobjects
| Limit Total Count |
Limit the number of total picked objects. |
| Planned Count |
The maximum number of total picked objects. |
| Total Count of Picked |
The number of objects that have been already picked. |
| Count of Picked This Time |
The number of objects picked this time. |
| Set Count Each Time |
Specify the number of objects to be picked at a time. |
| Limit Count Each Time |
Specify the maximum number of objects to be picked at a time. The maximum number of objects or fewer objects can be picked at a time. |