Multi Pick Palletizing
Function
Based on the positions to be occupied in the target pallet pattern and the box group in the stack to be depalletized, this Step computes a path for multi-pick palletizing to enhance efficiency.
Parameter Description
General Parameters of Move-Type Steps
Send Waypoint
Selected by default to send waypoint poses to the receiver, such as the robot. When this option is unselected, the waypoint will not be sent. However, the waypoint will remain in the planned path.
Try Continuously Running through Succeeding Non-Moves
Unselected by default. When non-move Steps, such as Vision Look, Set DO, Check DI, etc., are connected between move-type Steps, the robot’s path planning will be interrupted, and the actual robot will take a short pause, reducing the smoothness of running. When this option is selected, the project will continue to run without waiting for the current move-type Step to complete execution, and therefore the robot can move in a smooth way without pauses. However, enabling this option may cause the execution of the Step to end prematurely.
|
Why will this option cause the execution of the Step to end prematurely? Mech-Viz will send multiple poses simultaneously to the robot when the project is running. When the currently returned JPs of the robot correspond to the last pose sent by Mech-Viz, Mech-Viz will assume that the robot has moved to the last position. For example, there are 10 move-type Steps in a path, and the pose of the 5th move-type Step is the same as that of the last move-type Step. When the robot moves at low speed, it sends JPs to Mech-Viz when it moves to the 5th move-type Step, Mech-Viz may mistakenly determine that the robot has finished the move-type Steps and prematurely ends the Steps since the poses of the 5th move-type Step and the last move-type Step are the same in the path. |
Do Not Check Collision with Placed Workobject
Unselected by default, namely that the collision with the already placed objects will not be detected. When this option is selected, the collisions between the robot, end tool, and placed objects will be detected.
In palletizing scenarios, the two possible cases of error are as follows:
-
In palletizing scenarios, when the robot is placing a carton, the carton to place may come into light contact with the placed cartons while no deformation will be caused. After Mech-Viz detects this collision in simulation, it will plan other positions for placing the carton, and therefore a full stack cannot be formed.
-
Usually, the TCP of a suction cup is inside the suction cup model instead of on the surface of it. Under this circumstance, the suction cup may be embedded in the model of the carton to be picked in the simulation of picking, while Mech-Viz does not detect the collision between the end tool and the object to be picked. After the robot places the object and the carton model turns into an object model in the scene, a collision between the suction cup and the carton will be detected and the palletizing cannot be completed.
When this option is selected, no collision between the robot, end tool, and the placed object will be detected, and the above two cases of errors can be avoided.
Point Cloud Collision Detection Mode
Select the proper mode according to the requirement of the on-site situation. Usually, the default setting Auto can be used. Do not check collision mode can be used in move-type Steps before the robot picks the object, and Check collision mode can be used after the robot picks the object.
| Auto |
Default setting. Collision with point cloud is checked only for the “Vision Move” Step and the “Relative Move” Step that depends on the “Vision Move” Step, but not for all move-type Steps. |
| Do not check collision |
Point cloud collisions for all move-type Steps will not be detected. |
| Check collision |
Point cloud collisions for all move-type Steps will be detected. |
| When is switched on, Mech-Viz will detect collisions between the robot model, end tool model, and point cloud when planning the path. Normally, Mech-Viz detects whether the robot collides with other objects during picking and placing. When there are point cloud outliers, non-exiting collisions will be detected, which leads to errors in path planning. |
Ignore Workobject Symmetry
This parameter will only take effect when Waypoint type of the Step is set to Workobject pose.
| None |
Default setting, i.e., do not disable symmetry on any axis. |
| Around workobject frame Z axis |
Only disable symmetry on Z-axis of the workobject reference frame. |
| Around workobject frame X&Y axis |
Disable symmetry on X-axis and Y-axis of the workobject reference frame. |
| Around all axes |
Disable symmetry on all axes. |
Once the object symmetry is disabled, the robot will place the objects strictly according to the workobject poses.
|
In some special cases, objects are not pickable due to their peculiar poses. Setting Rotational symmetry under in Resources may solve this problem. Candidate poses of the recognized workpiece will be calculated according to the set rotational symmetry angle. When Mech-Viz plans to pick workpieces, if the default pose is not feasible for picking, the candidate poses will be tried. As the candidate poses calculated based on the settings of Rotational symmetry are different from the original poses output from Mech-Vision, the consistency of the objects’ place poses cannot be guaranteed. |
Index
Starting Index
| Description |
The index of the box to be placed. |
| Value |
Integers, and the default value is 0. |
| Usage |
When there is not any box on the pallet, the value is 0. If the palletizing process pauses and then continues, and N boxes have been palletized, the value should be set to N. Then the software will start with the N+1 box for palletizing. |
Basic Pallet Settings
Motion Control
Auto Middle Point Force MoveJ
Selected by default, i.e., the robot moves in joint motion type before palletizing.
Entry Force MoveJ/Adjust Force MoveJ/Place Force MoveJ
Unselected by default, i.e., the robot does not need to move in joint motion type when it approaches the pallet, adjusts the pose, and places the box.
When the workspace on site is limited and the palletizing should be performed in linear motion, select the parameter. A limited workspace may lead to singularities. In this case, you can set the robot motion in any process (Entry, Adjust, Place) to joint motion.
Acc&Vel Scale Ratio
| Value |
0–100%, the default value is 100%. |
| Usage Scenario |
This parameter can be configured when the robot’s speed differs between approaching the stack and actually placing the boxes. |
| Description |
The acceleration and speed when the robot places the boxes, which is calculated by Acceleration & Velocity × Acceleration & Velocity Scale Ratio. The process of the robot entering the stack area can be divided into 3 segments: Segment 1: indicated by purple arrows—approaching the stack The acceleration and velocity when the robot approaches the stack (indicated by purple arrows) are specified in “Basic move settings”, and the acceleration/velocity for the last two segments are Acceleration & Velocity × Acceleration & Velocity Scale Ratio. 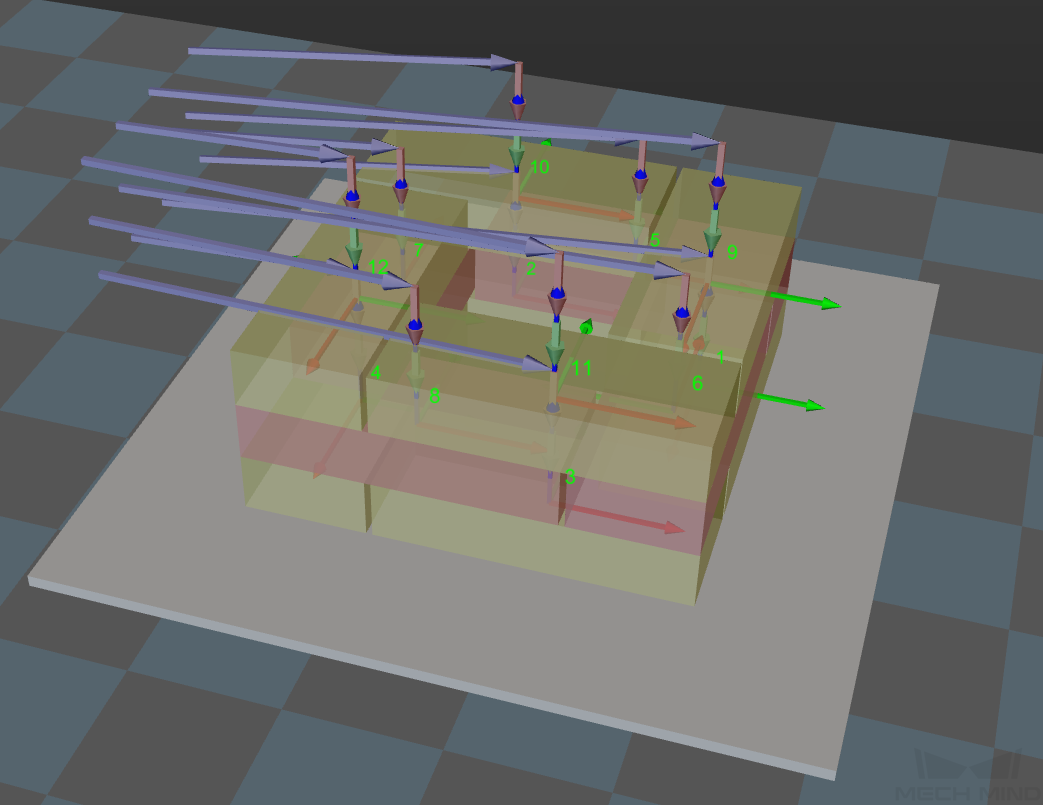
|
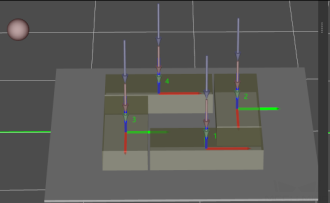
Entry Adjust
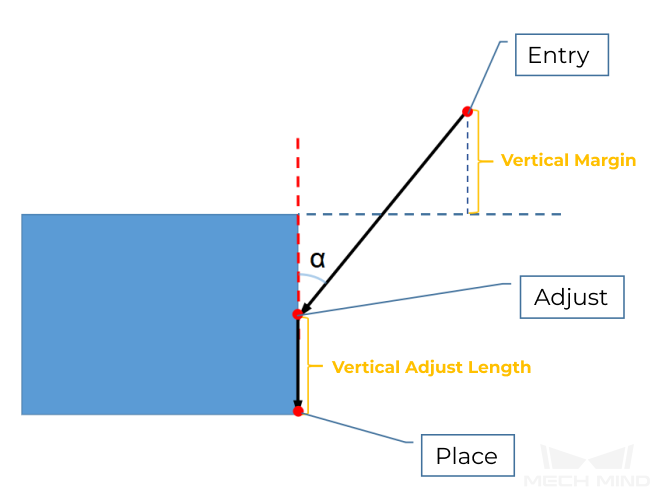
The three parameters together determines the path along which the robot enters the stack area. Adjust the entry path to make the held box approaches the palletized boxes at a specified angle, and then the held box will be placed vertically. If the box is directly placed on the stack in a vertical path, collisions may occur between the robot, held box, and the palletized boxes due to accuracy and other factors.
This parameter group determines three positions, as indicated by the red points in the figure, where the box will be moved to when it is placed on the stack. The figure below demonstrates the positions where the box will be moved (in the front view).
Vertical Adjust Length Ratio
| Description |
This parameter affects the “Adjust” position in the figure above. Vertical Adjust Length Ratio = Vertical Adjust Length / Height of the Box |
| Value range |
0–1 |
| Recommended value |
0.5 |
Vertical Margin
| Description |
This parameter affects the “Entry” position in the figure above. The vertical margin is marked in the figure above. |
| Value range |
0–∞; unit: mm. This parameter is used to control the distance above the boxes when the robot approaches the stack. The value should be adjusted according to the on-site situation. |
Auto Middle Point
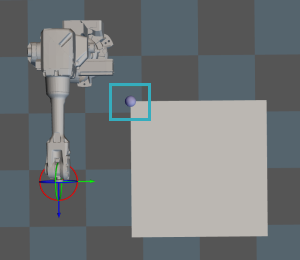
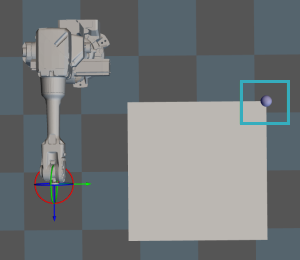
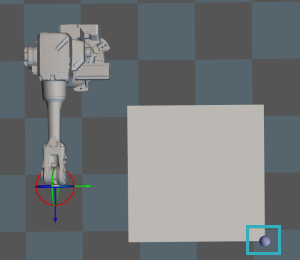
X/Y
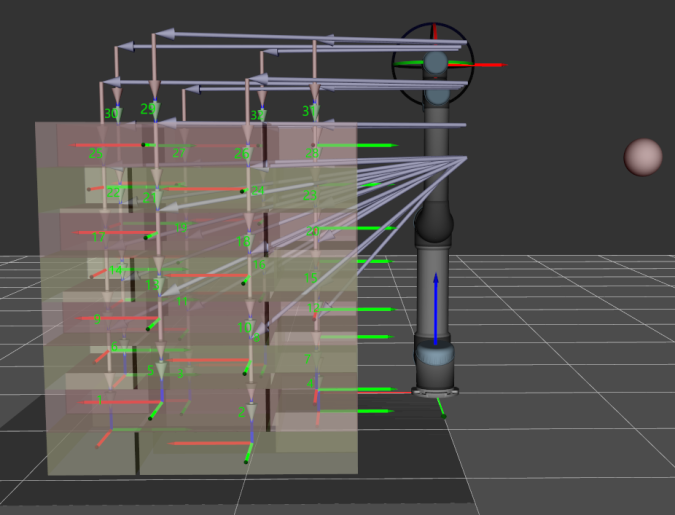
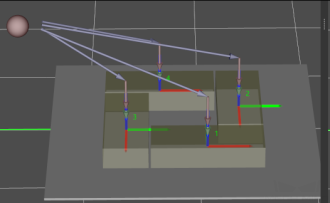
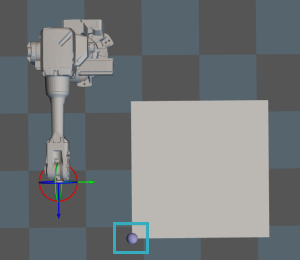
Set the position of the auto middle point (indicated by the pink sphere) in the robot reference frame. Based on this point, center coordinates of stacks with different heights will be calculated.
Min Z
When the robot enters the stack area (the path is indicated by the purple arrows), the minimum absolute distance in the Z-direction, i.e., the difference between the Z-direction height and the height of the current layer, as shown in the figure below.
Is Middle Point Traj Vertical
Unselected by default, i.e., the robot will approach the stack from the auto middle point.
Once this option is selected, the robot will approach the stack from directly above each placing position.
Extended Distance For Entry
For some circumstances, the vacuum gripper is too large, and it may collide with the palletized boxes when approaching the stack. The Extended Distance For Entry can be set to avoid collisions in the approaching process and ensure safety.
| Auto Middle Point is introduced as a direction reference when the robot approaches the stack, and the point is not an actual waypoint where the robot will move. The auto middle point should be as far away from the pallet as possible. If the auto middle point is too close to the pallet, collisions may occur when palletizing. |
Adjust Pallet via Vision
Adjust the position of the pallet dynamically via the “Vision Look” Step.
Need Adjust Pallet Pose
Unselected by default. Select to adjust the pallet position dynamically. When the workflow executes to this Step, the “Vision Look” Step will be used to recognize the position of the pallet.
Vision Name
Enter the name of the Mech-Vision project in which the “Vision Look” Step will be used to recognize the pallet position. When the workflow executes to this Step, the “Vision Look” Step in the Mech-Vision project will be used.

| The parameters can also be adjusted by the Adapter program. |
- Prior Corner
-
If a prior corner is selected, the box will be stacked in that corner first. The corner will change along with the pallet pose.
-
OO: The reference corner of the pallet. If the center of the pallet coincides with the origin of the robot reference frame, OO represents the corner in the negative X and negative Y direction of the robot reference frame.
-
OY: Based on the reference corner OO, the pallet corner that is in the positive Y direction of the robot reference frame.
-
XY: Based on the reference corner OO, the pallet corner that is in the positive Y and X directions of the robot reference frame.
-
XO: Based on the reference corner OO, the pallet corner that is in the positive X direction of the robot reference frame.
-
| OO | OY |
|---|---|
|
|
XY |
XO |
|
|
- No Symmetry
-
Select the checkbox and rotational symmetry will not be applied during palletizing.
- Revise to Ideal Pallet Pattern
-
If this option is not selected, little frictions between the palletized boxes are allowed by default. Once this option is selected, collision models of all palletized boxes are adjusted to the ideal positions of boxes in the target pallet pattern.
- Dist Error
-
The maximum difference between the coordinates of boxes in the box group to be picked and the coordinates of the target position in the XY-plane.
If the difference exceeds the value, the matching fails.
- Save and Load Pallet Info
-
This feature supports recording the pallet pattern and continue palletizing.
If there is no pallet pattern generated from the Palletizing Steps automatically, the pallet pattern saved in the JSON file will be used. If the JSON file does not define a pallet pattern, an error may occur.
If Palletizing Steps automatically generate a pallet pattern, the pallet pattern will be used and saved to the JSON file.
- File Path of Pallet Info
-
Click
 to select the saved JSON file.
to select the saved JSON file. - Selected Offline Pallet
-
Select the pallet pattern for palletizing. Multi Pick Palletizing itself cannot generate a pattern pattern, it should obtain the pallet pattern from other sources.
Application Example
When Multi Pick Palletizing is used in conjunction with Reset, the last round of palletizing result will be discarded, and the pallet pattern will be re-obtained from Selected Offline Pallet.