Sort Pick Points
Function
This Procedure converts poses under the camera reference frame to the robot reference frame, then sorts poses according to a specified rule, and finally maps poses to multiple pick points based on a pick point model.
-
Input: the pose list to be sorted.
-
Output: the pick point pose list, the pose classification label list, the pose offsets, and the object indices.
The graphical programming of the Procedure is shown below.
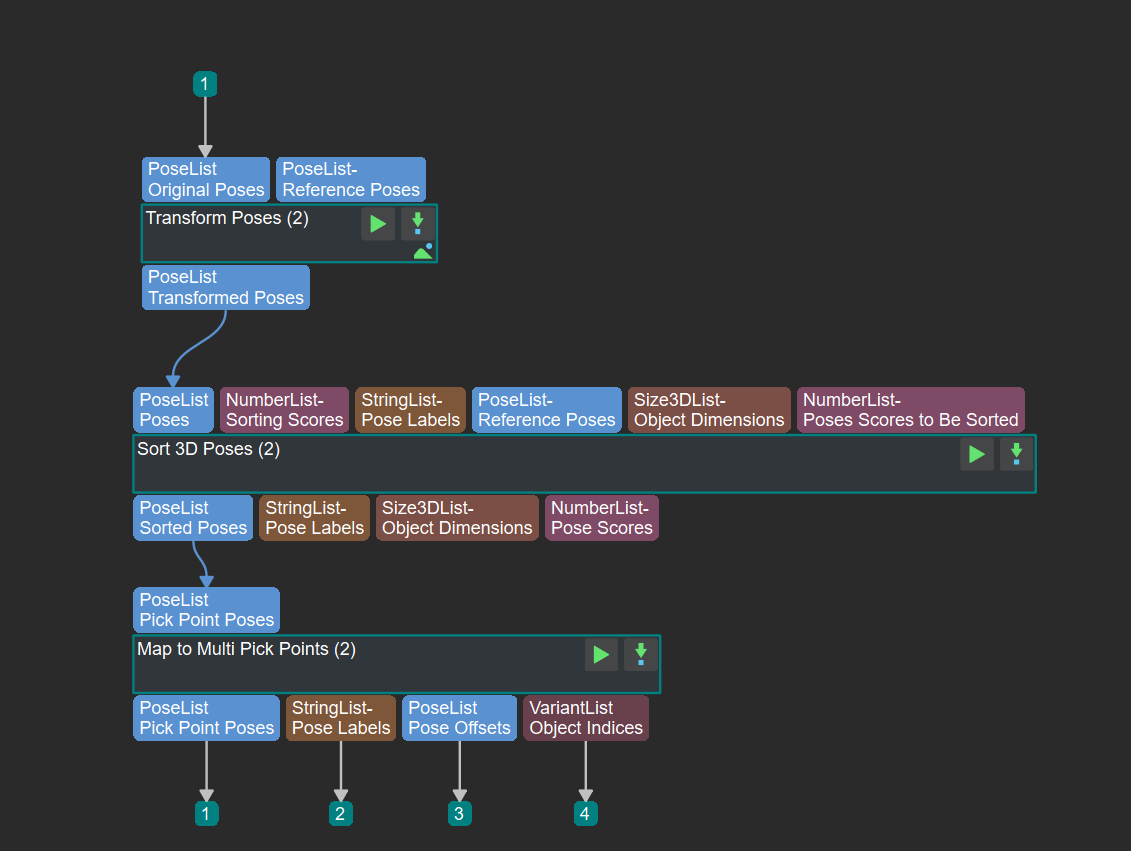
The functions of the Steps involved are as follows (please click the links for detailed descriptions of the Steps):
Transform Poses transforms the input pick point poses under the camera reference frame to the robot reference frame to enable robot picking.
Sort 3D Poses sorts the input transformed pick point pose list based on some specific rules, such as sorting by the X values in descending order and sorting by the pose scores in ascending order.
Map to Multiple Pick Points maps each sorted pose to multiple pick points based on a pick point model to increase the feasibility of picking.
Usage Example
In the example, this Procedure converts poses under the camera reference frame to the robot reference frame, then sorts poses by the Z values in descending order, and maps each pose to multiple pick points for output in the end.
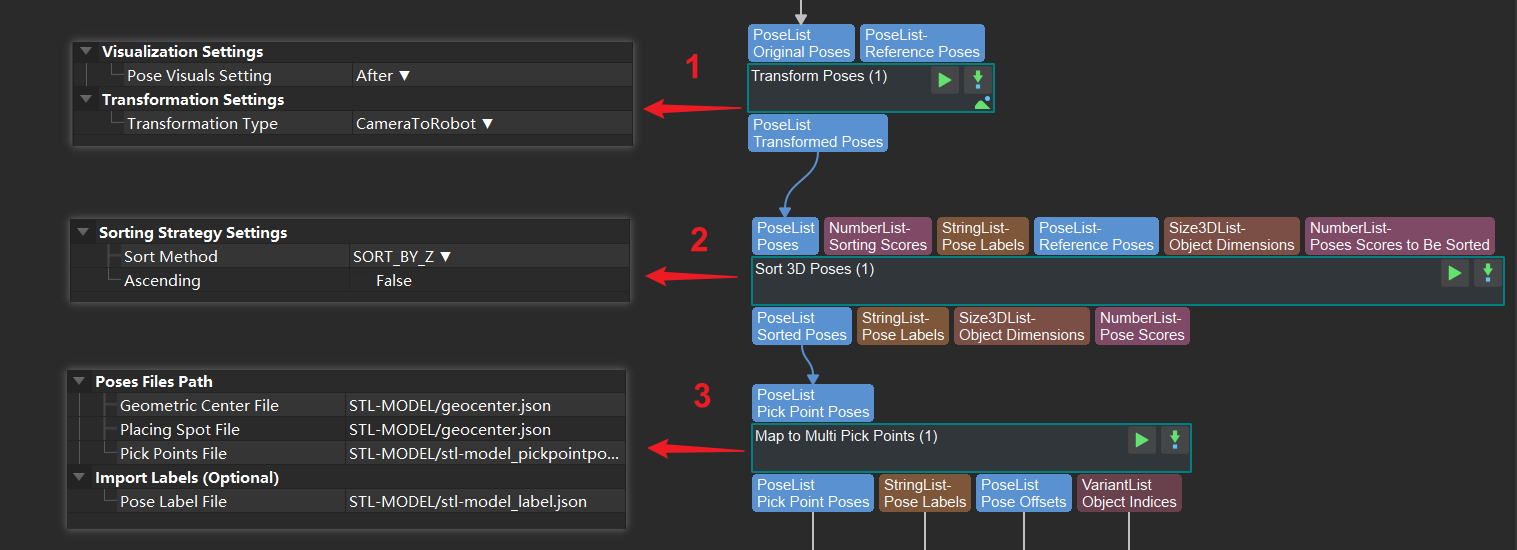
The figure below shows the settings of parameters.
-
Transform poses to the robot reference frame.
-
Sort poses by the Z values in descending order.
-
Map each pose to multiple pick points.
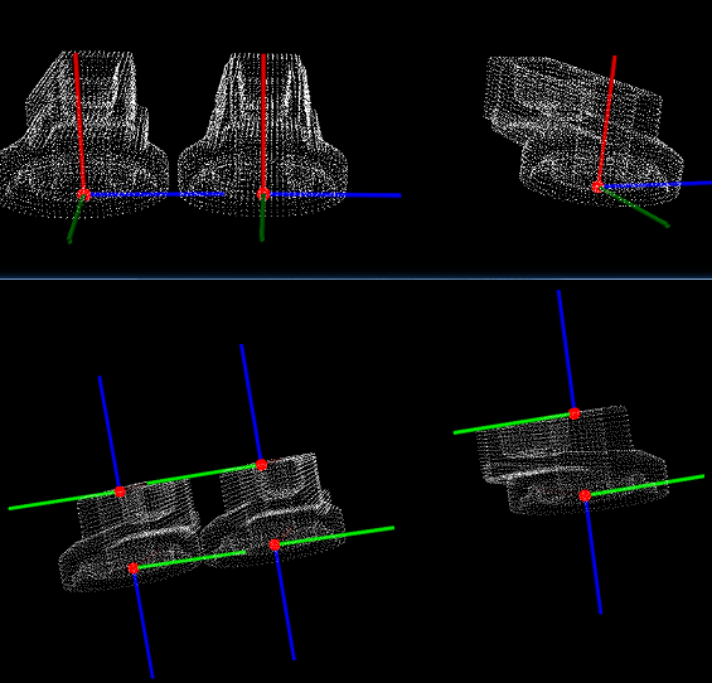
The upper and lower part of the figure below shows the poses and the mapped multiple pick points, respectively.