Translate Poses along Given Direction
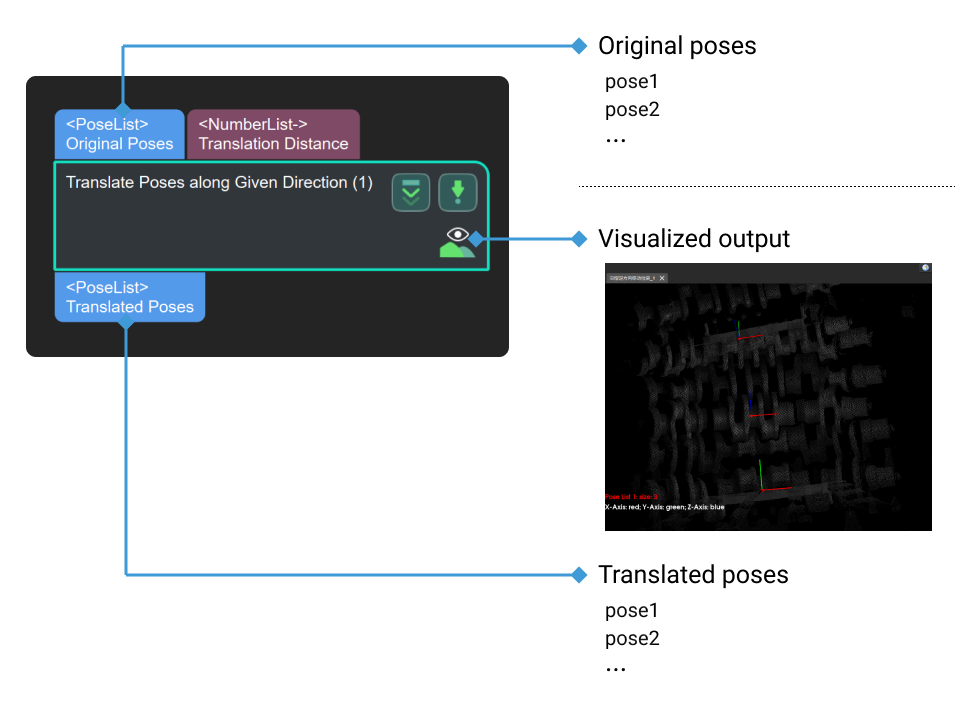
Parameter Description
Visualization Settings
- Show Point Cloud In Selected Frame
-
Default setting: Robot Coordinate.
List of options: Robot Coordinate, Camera Coordinate.
Instruction: Please refer to Show Point Cloud In Selected Frame for detailed instructions.
- Pose Type to Visualize
-
Default setting: After.
Options: Before, After, and All.
Instruction: Please refer to Show Point Cloud In Selected Frame for detailed instructions.
Translation Direction Settings
- Translation Distance
-
Default value: 0
Instruction: Set the parameter according to actual situation.
- Translation Direction Source
-
Default setting: CustomizedDirection (translate along the customized direction).
Options: CustomizedDirection (translate along the customized direction), ObjectAxis (translate along the direction of the specified axis of the pose).
Instruction: Set the parameter according to actual situation.
|
When ObjectAxis is selected, you will need to select an axis according to the actual situation. 
|
CustomizedDirection (this option will only appear when CustomizedDirection is selected).
- X
-
Default value: 0
- Y
-
Default value: 0
- Z
-
Default value: 1
Tuning Examples
-
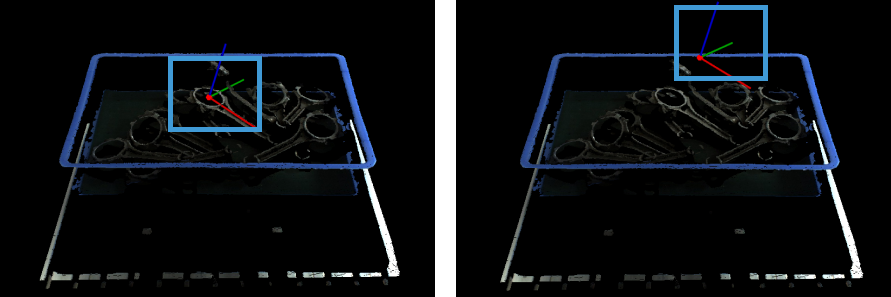
The figure below shows the pose before and after being translated 0.03 mm along the X axis of the object reference frame. In this example, ObjectAxis is selected as the Translation Direction Source; the specified axis is the X axis; and the Translation Distance is set to 0.03 mm.

-
The figure below shows the pose before (left) and after (right) being translated 0.03 mm along the Y axis of the object reference frame. In this example, ObjectAxis is selected as the Translation Direction Source; the specified axis is the Y axis; and the Translation Distance is set to 0.03 mm.

-
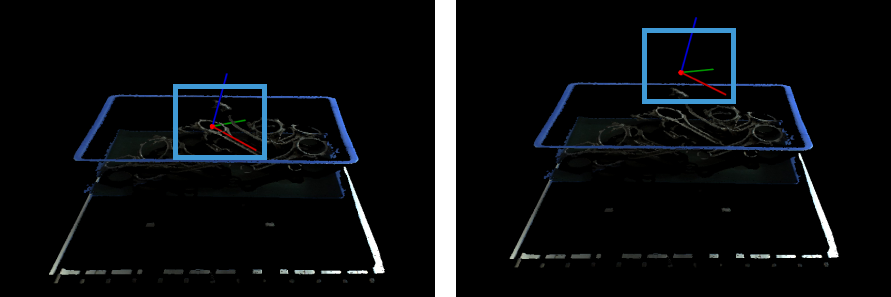
The figure below shows the pose before (left) and after (right) being translated 0.08 mm along the Z axis of the object reference frame. In this example, ObjectAxis is selected as the Translation Direction Source; the specified axis is the Z axis; and the Translation Distance is set to 0.08 mm.
-
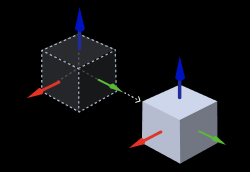
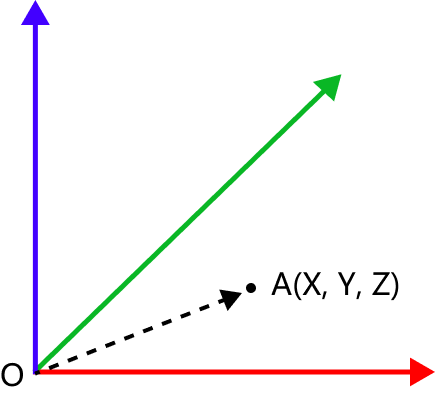
When CustomizedDirection is selected as the Translation Direction Source, you will need to set the values of X, Y, and Z in CustomizedDirection. As shown in the figure below, the path from the origin O to A (X, Y, Z) is the direction for the pose translation.
As shown below, in this example, the values of X, Y, and Z are all set to 5, and the Translation Distance is set to 0.08 mm. The figure shows the pose before (left) and after (right) being translated 0.08 mm along the customized direction.