Point Cloud Preprocessing
Function
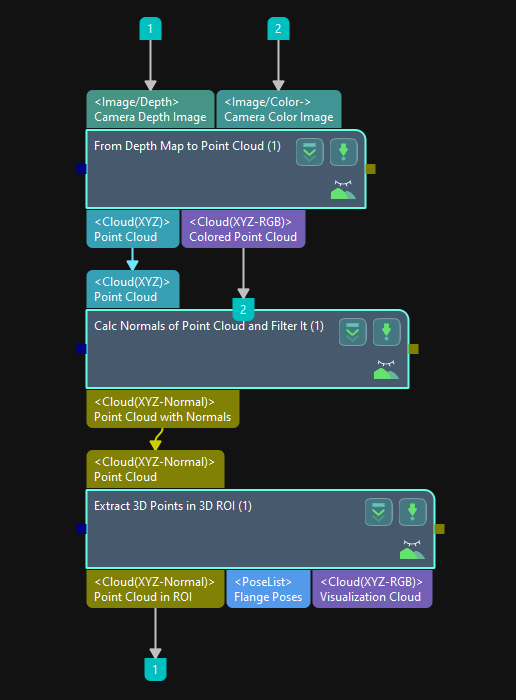
The main function of this procedure is to generate the point cloud, remove noise, and then obtain the point cloud in the ROI, thus speeding up the process of subsequent Steps. The components of the Procedure are shown as below.
Usage Scenario
It usually follows the Step Capture Images from Camera to preprocess the original point cloud and thus accelerate the process of subsequent Steps.
Preprocessing Process
The Procedure includes the following Steps: From Depth Map to Point Cloud, Calc Normals of Point Cloud and Filter It, and Extract 3D Points in 3D ROI.
From Depth Map to Point Cloud
Input the original colored image and its depth image into the Step From Depth Map to Point Cloud, and the current scene point cloud is output.
Calc Normals of Point Cloud and Filter It
Calculate the normal vectors and remove useless points of the point cloud obtained by inputting the scene point cloud to the Step Calc Normals of Point Cloud and Filter It, and the filtered point cloud with normal vectors is output.
Extract 3D Points in 3D ROI
Input the processed point cloud into the Step Extract 3D Points in 3D ROI and then extract part of the point cloud in the ROI.
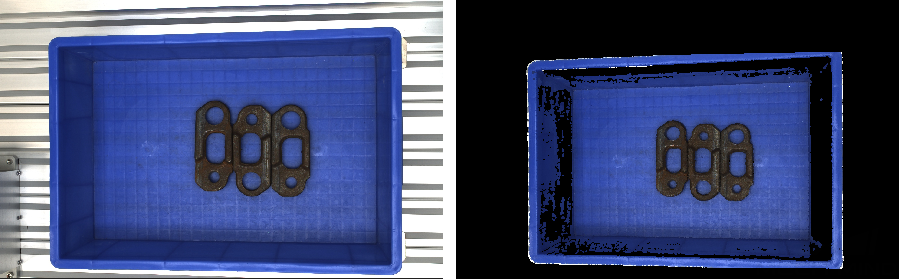
The following figures show the results before and after point cloud preprocessing. The figure on the left is the result before point cloud preprocessing, and as no ROI is set, it contains the irrelevant point cloud in the scene. The figure on the right is that after point cloud preprocessing, and as a ROI is set, the useless point cloud is removed to facilitate the process of subsequent Steps.
Parameter Tuning
Extract 3D Points in 3D ROI
- Set 3D ROI
-
Description: This parameter is used to set the 3D ROI.
Instruction: Click Set 3D ROI, and then set the 3D ROI in the pop-up window.