ステップパラメータの設定
全体的設定
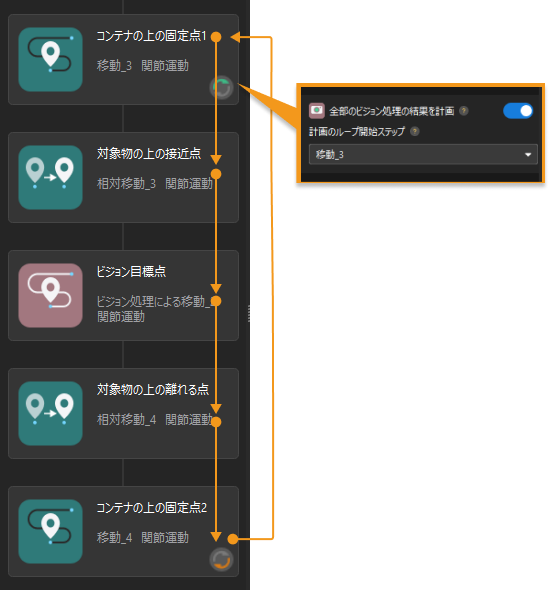
全部のビジョン処理の結果を計画
使用すると、受信したビジョン処理の結果が全部使用されるまで、現在のワークフローをループし、計画終了後に計画した把持経路を全部出力します。このパラメータを使用するには、計画のループの開始ステップ を指定する必要があります。
| 計画とは、ソフトウェアは衝突が発生しない、かつスムーズに目標位置に到達するロボット移動経路を計算する過程のことです。 |
計画のループの開始ステップは、ループの開始位置を意味します。以下の例では、開始ステップは「移動_3」と指定され、ソフトウェアはビジョン目標内のすべてのビジョン結果が計画されるまで、現在のワークフローをループします。
箱のデパレタイジング
このパラメータを有効にするとデパレタイジングモードになります。デパレタイズ用吸盤と併用する必要があります。また、実際の状況に応じてデパレタイズモードを選択する必要があります。
| 「箱のデパレタイジング」を有効にすると、デフォルトで目標コンテナの点群が除去され、XY 方向点群除去範囲拡張 は10mm、Z 方向点群除去範囲拡張 は30mmとなります。詳細については、対象物の点群を除去 をご参照ください。 |
単一把持
一回に箱を一個だけ把持します。
設定手順は以下の通りです。
-
リソースツリーの ロボットハンド の右側にある +, をクリックし、ロボットハンド設定 ウィンドウを開きます。
このウィンドウでは以下の設定を行います。
-
ロボットハンドの種類 を デパレタイズ用吸盤 に設定します。
-
デパレタイズ用吸盤 をクリックして 吸盤コンフィグレータ を開き、吸盤コンフィギュレータ を参照して設定を完了します。
-
-
「全体的設定」内の 箱のデパレタイジング を有効にします。
-
単一把持 パラメータを選択します。
-
実際の状況に応じて 箱カバー率下限 パラメータを設定します。
このパラメータは、把持を実行する時に吸盤が箱上面をカバーする面積が箱上面面積に対する割合を制限するために使用されます。実際の箱カバー率はこの値以上であれば把持可能とみなされます。
複数把持
複数の箱を組み合わせ、一回に箱の組合せを把持します。
設定手順は以下の通りです。
-
ロボットハンド設定 ウィンドウを開きます。
-
ロボットハンドの種類 を デパレタイズ用吸盤 に設定します。
-
デパレタイズ用吸盤 をクリックして 吸盤コンフィグレータ を開き、吸盤コンフィギュレータ を参照して設定を完了します。
-
-
「全体的設定」内の 箱のデパレタイジング を有効にします。
-
複数把持 パラメータを選択します。
-
実際の状況に応じて以下のパラメータを設定します。
-
箱カバー率下限
このパラメータは、把持を実行する時に吸盤が箱上面をカバーする面積が箱上面面積に対する割合を制限するために使用されます。実際の箱カバー率はこの値以上であれば把持可能とみなされます。
-
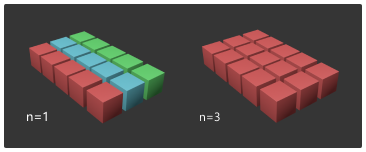
組合せの行数の上限
このパラメータは、複数把持する時に組合わせられる箱の行数の最大値を設定するために使用されます。
-
間隔の上限
このパラメータは、隣接する箱が「組合せ方向」に沿う間隔の最大値を設定するために使用されます。間隔がこの値より小さい箱が組合わせられます。
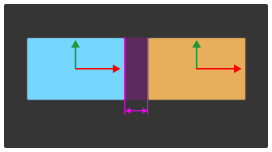
ただし、この値をビジョン処理の箱の幅より大きく設定できません。 -
偏差上限
このパラメータは、箱が組み合わせ方向に垂直する方向に沿う偏差を制限するために使用されます。偏差がこの値以下の箱は組み合わせ可能です。
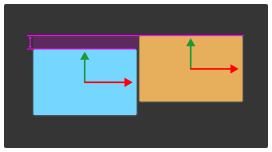
ただし、この値をビジョン処理の箱の幅より大きく設定できません。 -
組合せ角度のしきい値
このパラメータは、組合せ方向に対する箱の角度偏差を制限するために使用されます。角度がこの値より小さい箱が組み合わせられます。
-
移動
固定位置姿勢を経路点として設定します。
パラメータ説明
-
ロボットに送信するか
調整説明:このステップに対応する位置姿勢をロボットに送信するかどうかを設定します。
調整の例:計画するが送信しない場合、経路計画 ステップはこのステップに対応する位置姿勢を出力しません。
-
運動タイプ
調整説明:このステップに対応する位置姿勢へのロボットの移動方式を示します。直線運動は通常、接着剤塗布の場合に使用されます。
調整の例:関節運動を選択した場合、ロボットは関節運動の方式でこのステップに対応する位置姿勢に移動します。
-
経路点の表示方式
調整説明:位置姿勢の調整方式を選択します。
ロボットの位置姿勢を設定するには、以下のいずれかの方法を使用します。
-
関節角度 を設定します。
-
仮想空間のマニピュレータをドラッグ&ドロップします。
-
ロボット実機の位置姿勢をこのステップに入力します。
-
ティーチペンダントでロボットを移動させ、ツール位置姿勢または関節角度を記録します。
-
ロボット パネルで TCP タブを選択する場合、位置姿勢を調整 をクリックします。関節角度 タブを選択する場合、関節角度を編集 をクリックします。
-
記録されたツール位置姿勢または関節角度を入力し、OK をクリックします。すると、仮想ロボットは対応する位置姿勢に移動します。
-
相対移動
前または次の経路点に対するロボットのZ軸方向の動きを設定します。
パラメータ説明
-
ロボットに送信するか
調整説明:このステップに対応する位置姿勢をロボットに送信するかどうかを設定します。
調整の例:計画するが送信しない場合、経路計画 ステップはこのステップに対応する位置姿勢を出力しません。
-
運動タイプ
調整説明:このステップに対応する位置姿勢へのロボットの移動方式を示します。直線運動は通常、接着剤塗布の場合に使用されます。
調整の例:関節運動を選択した場合、ロボットは関節運動の方式でこのステップに対応する位置姿勢に移動します。
-
移動基準
調整説明:ロボット動作の基準位置姿勢を設定します。
調整の例:前の経路点 を選択した場合、ロボットが 前の経路点 をもとに移動します。
-
移動方向
調整説明:ロボットの移動方向を設定します。
調整の例:対象物座標系のZ方向を選択した場合、ロボットが対象物座標系のZ方向に沿って移動します。
-
移動距離
調整説明:移動方向に沿ってロボットの移動距離を設定します。