Inline Measurement Solution Deployment
This section is for project implementation engineers and explains how to deploy an inline measurement solution in phases.
It focuses on the goal of each phase, the phase completion criteria, and the corresponding detailed page. For detailed software operations, jump to the linked operation guides.
Deployment Workflow of an Inline Measurement Solution
In real projects, deployment of an inline measurement solution follows the stages shown below:
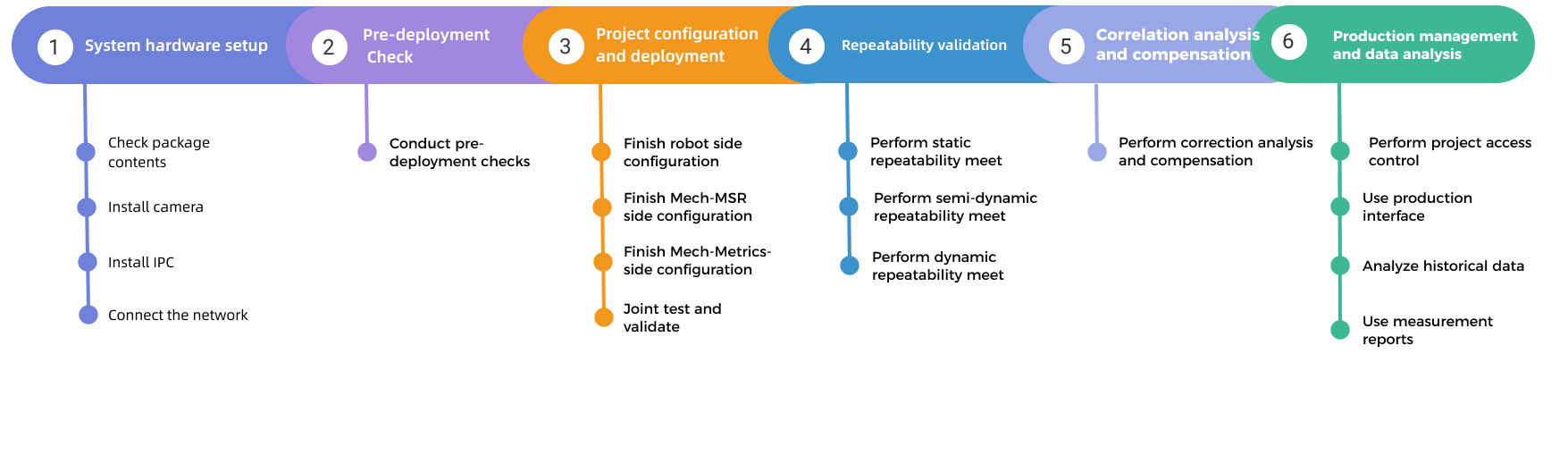
It is recommended to proceed in the following order:
| Phase | Goal | Completion Criteria | Details |
|---|---|---|---|
System hardware setup |
Install cameras, IPCs, and the network environment so the system can capture images stably. |
Cameras, IPCs, and the robot are connected, and image acquisition quality meets requirements. |
|
Pre-deployment checks |
Identify and mitigate risks related to hardware, robots, tooling, electrical systems, and on-site environment before joint debugging. |
Required checklist items are confirmed as passed, and the site is ready to enter configuration and joint debugging. |
|
Project configuration and deployment |
Complete configuration on the robot, Mech-MSR, and Mech-Metrics sides, and validate the basic data chain. |
Single-command, single-part, and end-to-end joint debugging pass, and the system can output measurement results stably. |
|
Repeatability validation |
Verify measurement consistency under identical conditions. |
Static, semi-dynamic, and dynamic repeatability meet project requirements. |
|
Correlation analysis and compensation |
Keep inline measurement results consistent with CMM results. |
Correlation meets agreement requirements, and compensation has been configured where necessary. |
|
Production management and data analysis |
Support permission management, data viewing, and continuous analysis after go-live. |
Users can perform daily operation, traceability, and measurement data analysis. |