Introduction to Communication Modes
After completing the hardware setup for the Mech-Mind inline measurement system, the communication mode between the Mech-Mind inline measurement system and external devices (such as robots, PLCs, or host computers) needs to be determined in order to establish and manage data exchange between them.
The Mech-Mind inline measurement system supports Standard Interface communication with external devices.
Standard Interface Communication
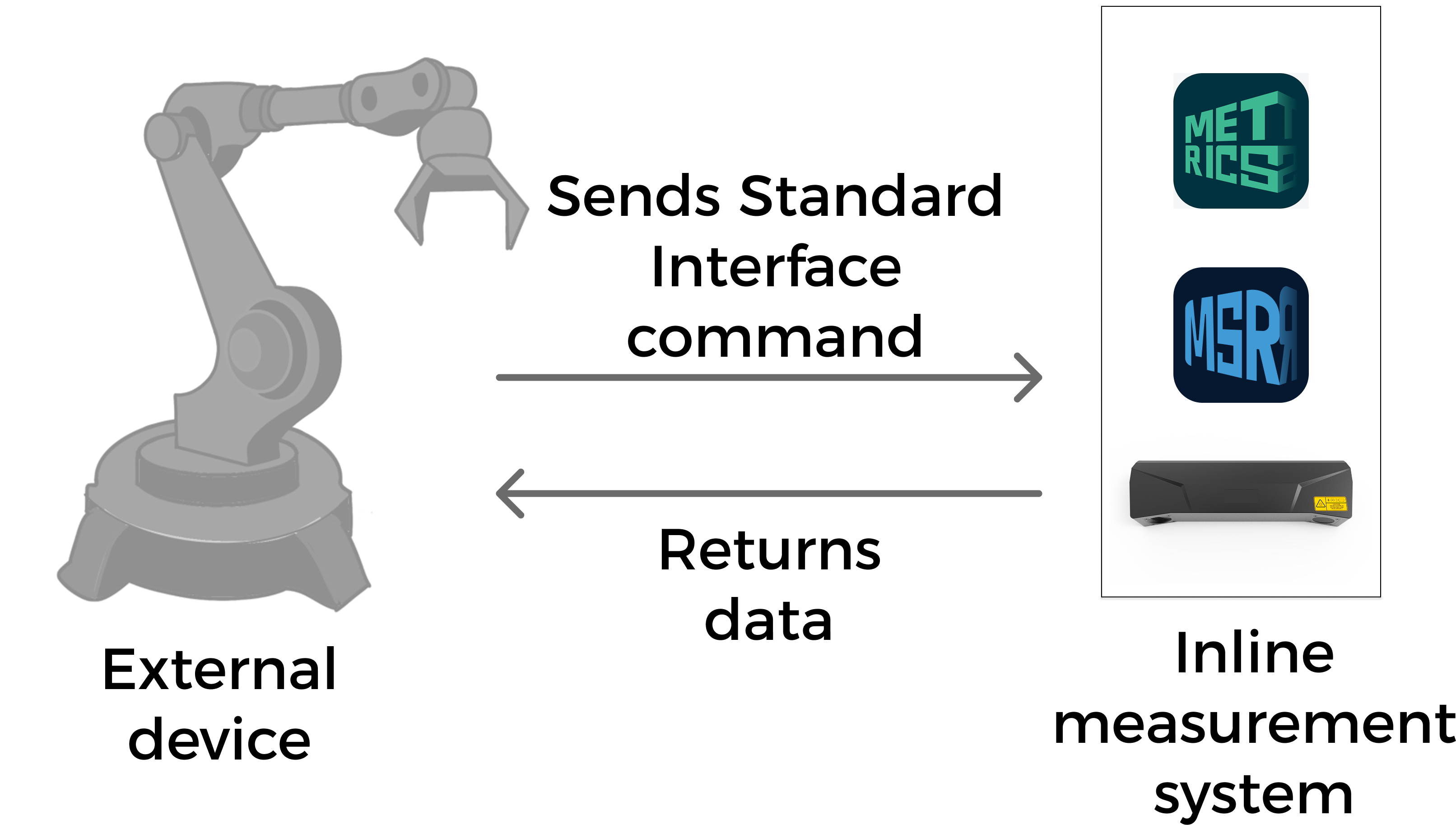
If the Standard Interface communication is established between the inline measurement system and an external device (such as a robot, PLC, or host computer), the external device sends Standard Interface commands to the inline measurement system and the system returns data upon receiving the commands. The following figure shows the process. In this communication mode, the inline measurement system does not actively control the external device and only passively returns data according to the commands received from the external device. Therefore, the Standard Interface program needs to be loaded onto the external device, and the corresponding program needs to be developed on the device to enable communication and data exchange with the inline measurement system.
For more information about Standard Interface communication, refer to Workflow of Standard Interface Communication.
Standard Interface Commands
Standard Interface commands are a set of commands developed by Mech-Mind for the inline measurement system based on the standard communication protocol. They define the data formats of command requests and responses. For more information about Standard Interface commands, refer to Standard Interface Commands.
Standard Interface commands cannot be used directly on the robot. Robots can only call dedicated robot commands. For supported robot brands, Mech-Mind encapsulates Standard Interface commands into robot-specific commands that can be directly called by the robot. After loading the Standard Interface program files to the robot, these commands can be used directly in the robot program.
-
If the Mech-Mind inline measurement system has been adapted to the external device, the robot Standard Interface commands can be used directly. For more information, see Standard Interface Communication.
-
If the Mech-Mind inline measurement system has not been adapted to the external device, the corresponding robot Standard Interface commands need to be written according to the Standard Interface Development Manual to enable Standard Interface communication.
Standard Communication Protocol
The Standard Interface communication mode supports various standard communication protocols, such as TCP ASCII, Modbus TCP, and Siemens Snap7.
For inline measurement applications, it is recommended to use the TCP ASCII communication protocol for Standard Interface communication. The following sections use TCP ASCII as an example.