Standard Interface Communication
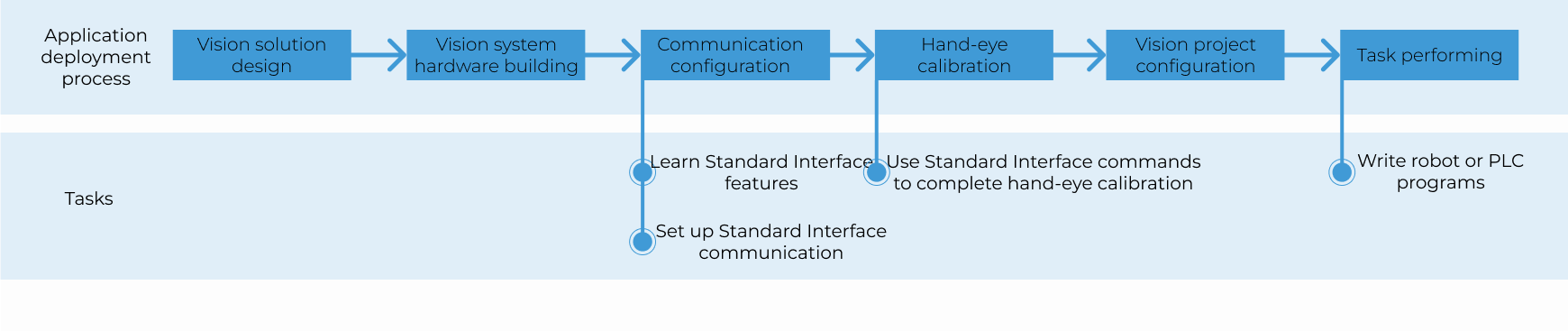
When deploying an Mech-Mind inline measurement solution, it is recommended to use Standard Interface communication mode to complete the robot communication configuration. After learning basic concepts in Standard Interface Communication, complete the Standard Interface communication tasks in the actual application deployment process based on the actual project requirements and the robot brand in use.
| This manual mainly describes the communication-related aspects in the deployment process of inline measurement applications. For details of other tasks in the deployment process, refer to the sections of Application Deployment. |
| Task | Description |
|---|---|
Learn Standard Interface features |
View the Standard Interface feature descriptions of the robot to make sure that the features meet the project requirements. |
Set up the Standard Interface communication |
Ensure that the robot can communicate with the inline measurement system. |
Use Standard Interface commands to complete calibration |
Establish the correspondence between camera and robot reference frames. |
Write robot program |
View the Standard Interface commands of the robot and write a robot program (for inline measurement) based on the corresponding standard example programs. The main function of this program is to exchange data between the inline measurement system and the robot. |
|