웨이포인트 유형
웨이포인트 유형 설명
말단장치 |
웨이포인트는 말단장치의 기준 좌표계의 X, Y, Z 값과 오일러 각/사원수 또는 회전 벡터로 표시됩니다.
|
JPs |
웨이포인트는 로봇 각 관절의 수치로 표시됩니다.
|
대상 물체 포즈 |
웨이포인트는 물체 기준 좌표계의 X, Y, Z 값과 오일러 각/사원수 또는 회전 벡터로 표시됩니다. 로봇이 작업을 수행할 때 처리해야 하는 실제 대상 물체의 위치와 방향을 설명하는 데 중점을 둡니다.
|
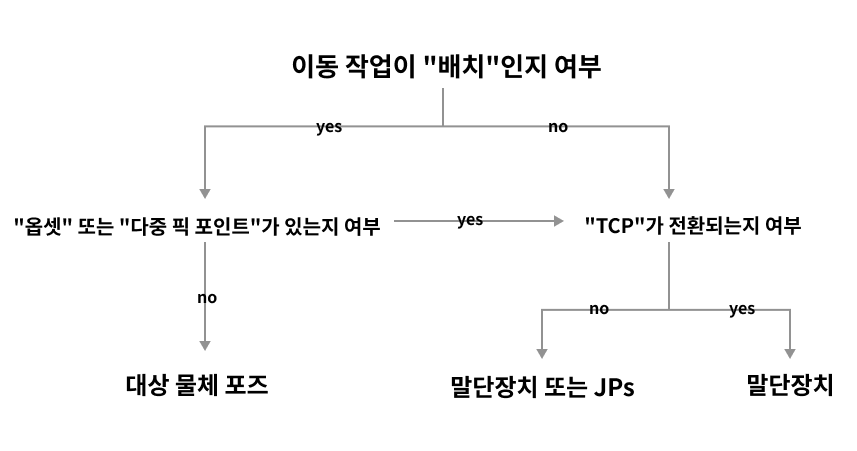
웨이포인트 유형을 선택할 때 판단 방법은 다음 그림과 같습니다.
파라미터 설명
포즈 편집 |
포즈를 직접 편집하고 복사/붙여넣을 수 있으며 사원수와 오일러 각 두 가지 형식을 지원합니다. |
포즈 변환 |
자체 정의를 통해 현재 포즈를 새 포즈로 변환하는 데 사용되며 포즈 파인튜닝에 적용됩니다. |
포즈 보정 |
대상 물체의 좌표계를 계산하는 ABB 로봇 삼점법과 유사하며 대상 물체가 회전할 때 포즈를 확인하기 쉽지 않은 시나리오에 적합합니다. 예를 들어 기울어진 직육면체의 회전 포즈를 계산하기 어려운 경우, 포즈 보정을 통해 직육면체의 회전 포즈를 먼저 계산하고 로봇이 계산된 포즈에 따라 실행하도록 합니다. |
JPs 편집 |
포즈를 편집하는 기능과 유사하여 관절 각도를 복사/붙여넣을 수 있고 라디안과 각도 두 가지 단위를 지원합니다. |
|
현재 시뮬레이션된 로봇의 포즈를 획득합니다. |
|
시뮬레이션된 로봇을 현재 설정된 포즈 위치로 이동합니다. |
|
현재 웨이포인트에 대한 모든 JPs 솔루션을 표시합니다. |


