포인트 클라우드를 외부 서비스로 보내기
파라미터 설명
포인트 클라우드 설정
- 입력된 포인트 클라우드의 유형
-
기본값: CloudXYZRGB(컬러 포인트 클라우드)
값 리스트: CloudXYZRGB(컬러 포인트 클라우드), CloudXYZ(포인트 클라우드), CloudNORMAL(법선 방향을 갖춘 포인트 클라우드).
설명: 실제 수요에 따라 보낼 포인트 클라우드 유형을 선택하십시오.
예시: CloudXYZRGB, CloudXYZ , CloudNORMAL를 선택했을 때 입력한 포인트 클라우드의 유형은 각각 아래 그림과 같습니다.



물체 정보 설정
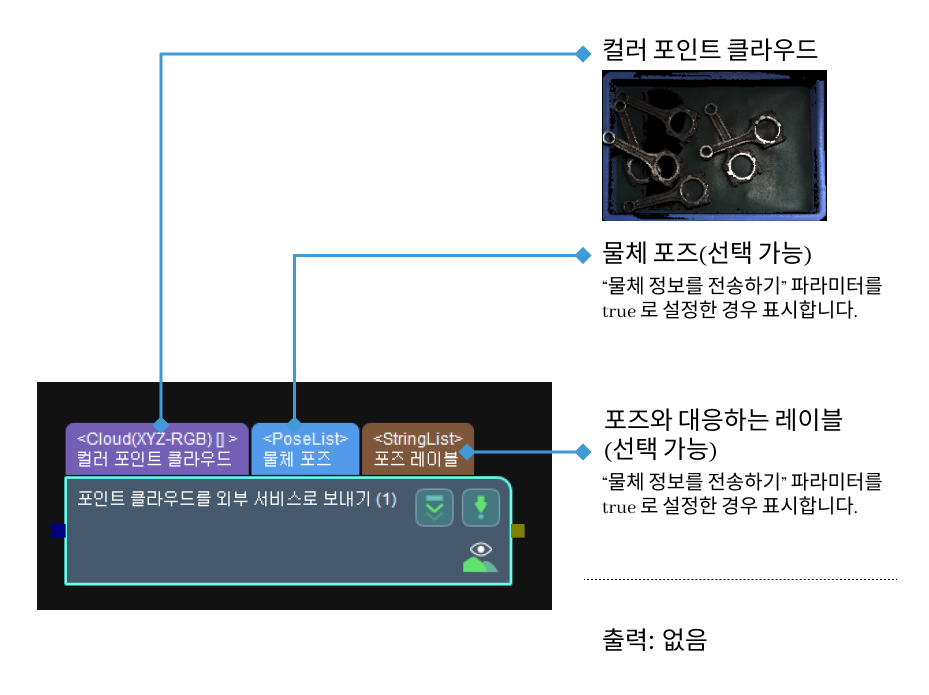
- 물체 정보를 전송하기
-
기본값: 선택하지 않음
설명: 선택하지 않으면 물체 포즈 및 포즈 레이블 포트가 닫히고 선택하면 물체 포즈 및 포즈 분류 레이블 포트가 열립니다. 실제 수요에 따라 물체 포즈 또는 포즈 레이블을 보낼지 선택하십시오. 선택 전과 후의 효과는 아래 그림과 같으며 그림 1은 선택 전, 그림 2는 선택 후입니다.

입력된 포인트 클라우드가 카메라 좌표계에 있는지
기본값: 선택함.
설명: 포인트 클라우드와 포즈가 카메라 좌표계에 있을 때 이 옵션을 선택하면 입력한 포인트 클라우드 및 포즈 정보는 로봇 좌표계로 전환되어 Mech-Viz로 보내게 됩니다. 선택하지 않으면 입력한 포인트 클라우드 정보는 직접 Mech-Viz로 보내게 됩니다.