포즈 조정 옵션을 추가하여 포즈를 조정하기(사용자 정의 모드)
사용자 정의 모드에서 포즈 조정 옵션을 추가하여 포즈를 조정하는 방법을 설명합니다.
|
한 번에 하나의 포즈 조정 옵션만 선택할 수 있지만, 동일한 포즈 조정 옵션을 반복해서 추가할 수 있습니다. |
포즈를 뒤집고 뒤집기 축과 목표 방향 사이의 각도를 최소화하기
기능 설명
이 기능은 고정된 축을 중심으로 포즈를 180° 회전시키고, 반전 축과 목표 방향 사이의 각도를 비교하여 가장 작은 각도의 시도 결과를 선택합니다. 일반적으로 매칭 결과를 처리하는 데 사용됩니다.
사용 방법
목표 방향 설정
목표 방향을 설정하는 방법에는 로봇 기준 좌표계 사용, 매니퓰레이터로 설정, 외부 스텝에서 입력 등 세 가지 방법이 있으며 구체적인 설명은 아래 표와 같습니다.
번호 |
목표 방향을 설정하는 방법 |
설명 |
방법 |
예시 그림 |
1 |
로봇 기준 좌표계 사용 |
로봇 좌표계의 각 좌표축의 방향을 설정하여 기준 방향을 설정합니다. |
|
|
2 |
매니퓰레이터로 설정 |
매니퓰레이터의 위치와 자세를 설정하여 목표 방향을 설정합니다. |
|
|
3 |
외부 스텝에서 입력 |
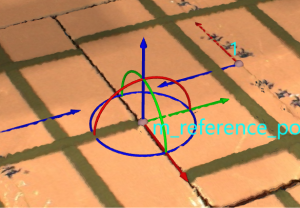
다른 스텝으로 참조 포즈를 입력합니다. |
|
|
포즈를 회전하고 회전축과 목표 방향 사이의 각도를 최소화하기
기능 설명
이 기능은 설정된 대칭성에 따라 고정된 축을 중심으로 포즈를 회전하려고 시도하고, 회전축과 목표 방향 사이의 각도를 비교하여 가장 작은 각도의 시도 결과를 선택할 수 있습니다.
사용 방법
목표 방향 설정
목표 방향을 설정하는 방법에는 로봇 기준 좌표계 사용, 매니퓰레이터로 설정, 외부 스텝에서 입력 등 세 가지 방법이 있으며 구체적인 설명은 아래 표와 같습니다.
번호 |
목표 방향을 설정하는 방법 |
설명 |
방법 |
예시 그림 |
1 |
로봇 기준 좌표계 사용 |
로봇 좌표계의 각 좌표축의 방향을 선택하여 기준 방향을 설정합니다. |
|
|
2 |
매니퓰레이터로 설정 |
매니퓰레이터의 위치와 자세를 설정하여 목표 방향을 설정합니다. |
|
|
3 |
외부 스텝에서 입력 |
다른 스텝으로 참조 포즈를 입력합니다. |
|
|
포즈 축을 목표 방향으로 회전하기
사용 방법
목표 방향 설정
목표 방향을 설정하는 방법에는 로봇 기준 좌표계 사용, 매니퓰레이터로 설정, 외부 스텝에서 입력 등 세 가지 방법이 있으며 구체적인 설명은 아래 표와 같습니다.
번호 |
목표 방향을 설정하는 방법 |
설명 |
방법 |
예시 그림 |
1 |
로봇 기준 좌표계 사용 |
로봇 좌표계의 각 좌표축의 방향을 설정하여 기준 방향을 설정합니다. |
|
|
2 |
매니퓰레이터로 설정 |
매니퓰레이터의 위치와 자세를 설정하여 목표 방향을 설정합니다. |
|
|
3 |
외부 스텝에서 입력 |
다른 스텝으로 참조 포즈를 입력합니다. |
|
|
포즈 축을 참조 포즈로 지정하기
사용 방법
참조 포즈 설정
참조 포즈를 설정하는 방법에는 매니퓰레이터로 설정 및 외부 스텝에서 입력 두 가지 방법이 있으며 구체적인 설명은 아래 표와 같습니다.
번호 |
참조 포즈를 설정하는 방법 |
설명 |
방법 |
예시 그림 |
1 |
매니퓰레이터로 설정 |
매니퓰레이터의 위치와 자세를 설정하여 참조 포즈를 설정합니다. |
|
|
2 |
외부 스텝에서 입력 |
다른 스텝으로 참조 포즈를 입력합니다. |
|
|
포즈 방향을 목표 포즈 방향에 맞추기
사용 방법
목표 포즈 설정
목표 포즈를 설정하는 방법에는 매니퓰레이터로 설정 및 외부 스텝에서 입력 두 가지 방법이 있으며 구체적인 설명은 아래 표와 같습니다.
번호 |
목표 포즈를 설정하는 방법 |
설명 |
방법 |
예시 그림 |
1 |
매니퓰레이터로 설정 |
매니퓰레이터의 위치와 자세를 설정하여 참조 포즈를 설정합니다. |
|
|
2 |
외부 스텝에서 입력 |
다른 스텝으로 참조 포즈를 입력합니다. |
|
|