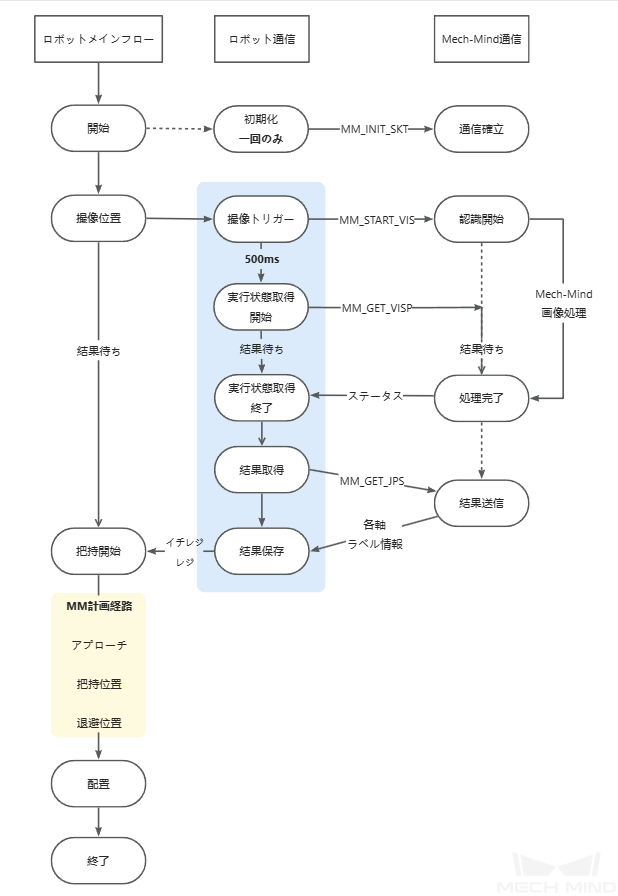
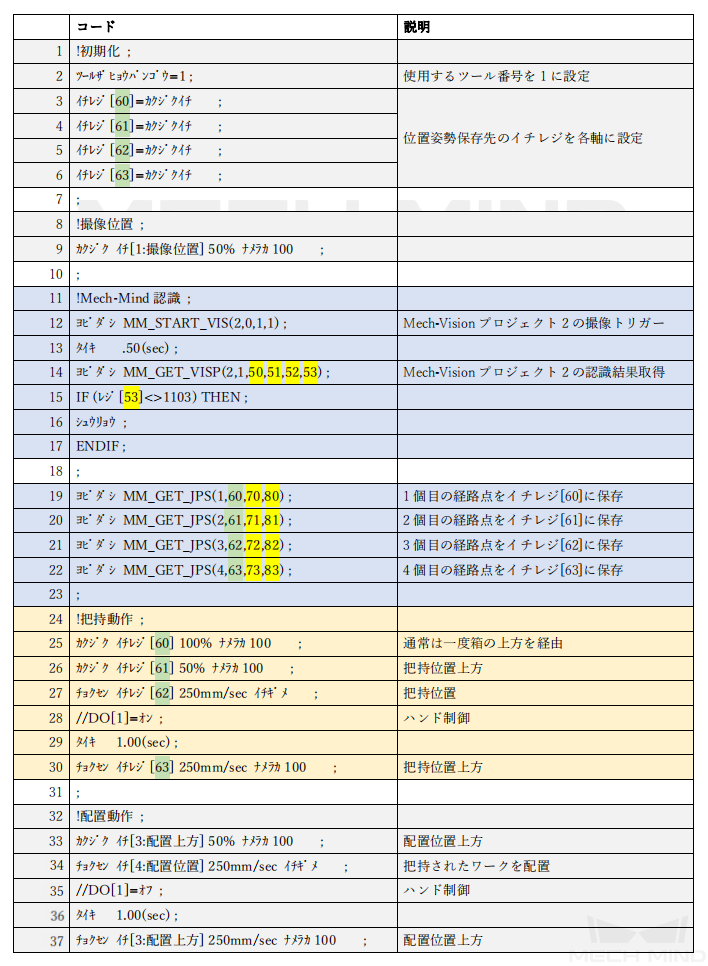
Mech-Vision経路計画機能の結果取得 現在ご覧いただいているのは最新版の内容です(V1.7.5)。異なるバージョンを参照する場合は、画面右上のボタンから切り替えが可能です。 ■ ご利用中のバージョンが分からない場合はお気軽にサポート窓口までご連絡ください。 概要 サンプル③「MM_S03_VISION ケイロ」は、Mech-Visionの 経路計画機能 を用いて、撮像と把持、その後に配置、シンプルなアプリケーションを実現しています。 処理フロー サンプルプログラム 格子塗りつぶし表記 Mech-Mind コマンド引数表記 サンプルプログラムの解説 レジスタ一覧 データ 内容 出元 サンプルで使用 イチ 1 撮像位置 教示 〇 イチ 3 配置上方位置 教示 〇 イチ 4 配置位置 教示 〇 レジ 50 全ての経路点を受け取ったか否か MM_GET_VIZ ✕ レジ 51 受け取った経路点の数 MM_GET_VIZ ✕ レジ 52 認識結果が受け取った経路点における順番 MM_GET_VIZ ✕ レジ 53 ステータスコード MM_GET_VIZ 〇 レジ 70-73 ラベル情報 MM_GET_JPS ✕ レジ 80-83 速度 MM_GET_JPS ✕ イチレジ60-63 経路点(各軸) MM_GET_JPS 〇 Mech-Viz経路を取得 Mech-Visionレシピ切替して認識結果を取得