Mech-Vision認識結果を取得
概要
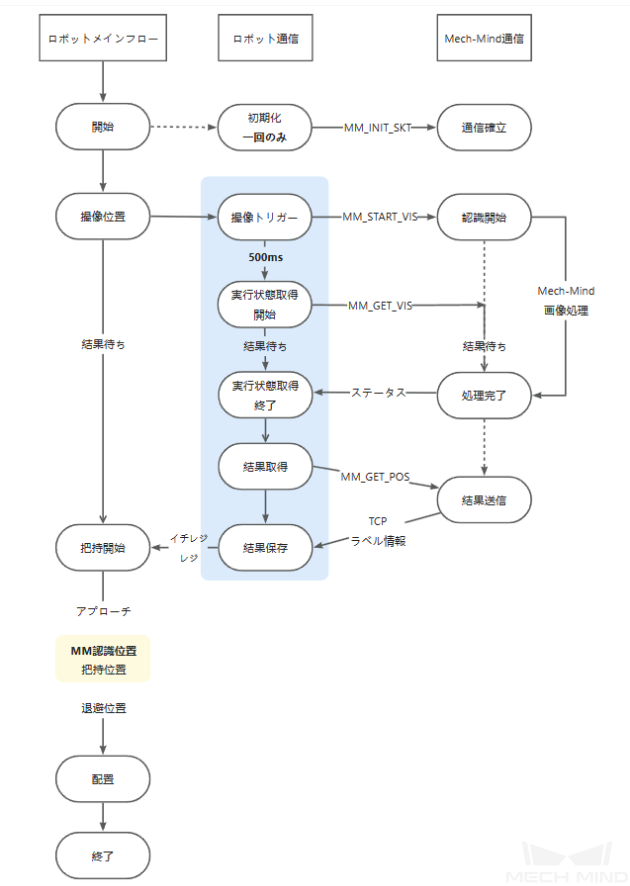
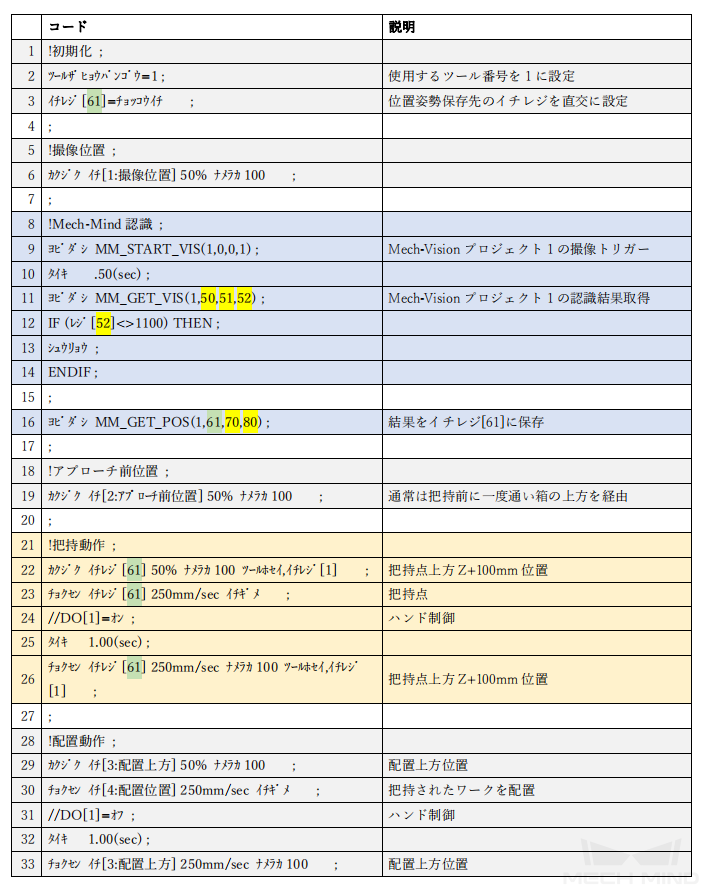
サンプル①「MM_S01_VISION」は、Mech-Visionの認識結果を元に、撮像と把持、その後に配置、シンプルなアプリケーションを実現しています。ただし、把持動作におけるアプローチ位置および退避位置は、Fanucの「ツール補正」命令によって、把持位置よりツール座標系Z軸負の方向に100mm離れた位置に生成されます。通常、把持位置の上方にあります。


レジスタ一覧
データ |
内容 |
出元 |
サンプルで使用 |
イチ 1 |
撮像位置 |
教示 |
〇 |
イチ 2 |
アプローチ前位置 |
教示 |
〇 |
イチ 3 |
配置上方位置 |
教示 |
〇 |
イチ 4 |
配置点 |
教示 |
〇 |
レジ 50 |
全ての位置姿勢を受け取ったか否か |
MM_GET_VIS |
✕ |
レジ 51 |
受け取った位置姿勢の数 |
MM_GET_VIS |
✕ |
レジ 52 |
ステータスコード |
MM_GET_VIS |
〇 |
レジ 70 |
ラベル情報 |
MM_GET_POS |
✕ |
レジ 80 |
速度 |
MM_GET_POS |
✕ |
イチレジ 1 |
Z100mm 補正用 形態:NUT (x,y,z,w,p,r),(0,0,-100,0,0,0) |
- |
〇 |
イチレジ 61 |
位置姿勢(直交) |
MM_GET_POS |
〇 |