Mech-Vizで分岐して経路取得(実行タイミングの工夫)
概要
-
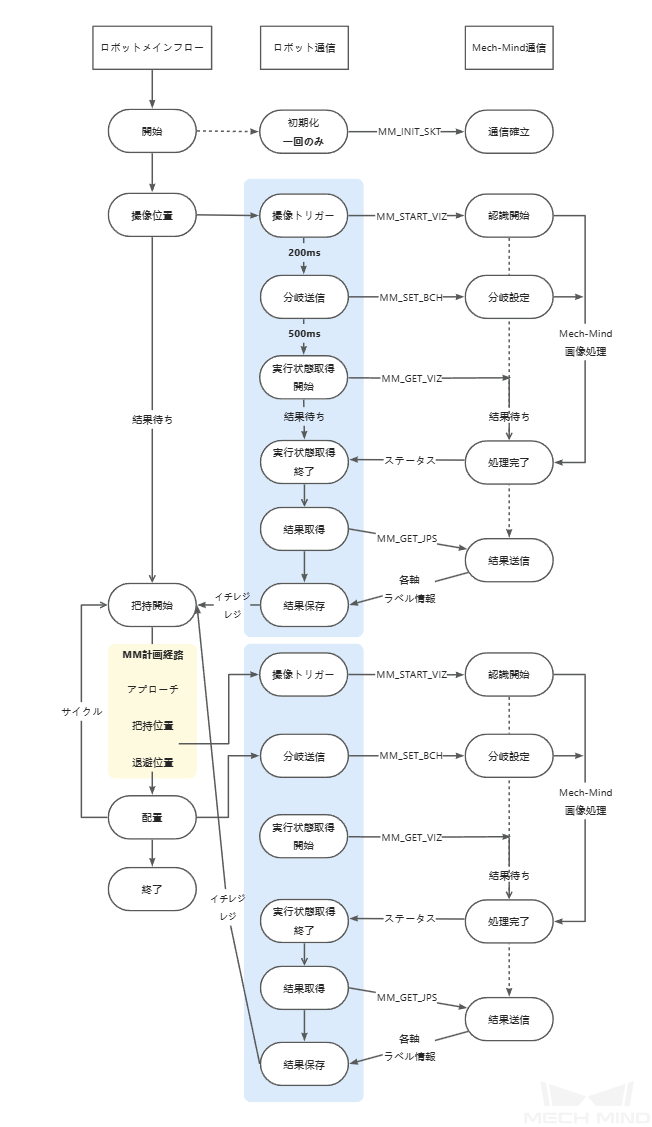
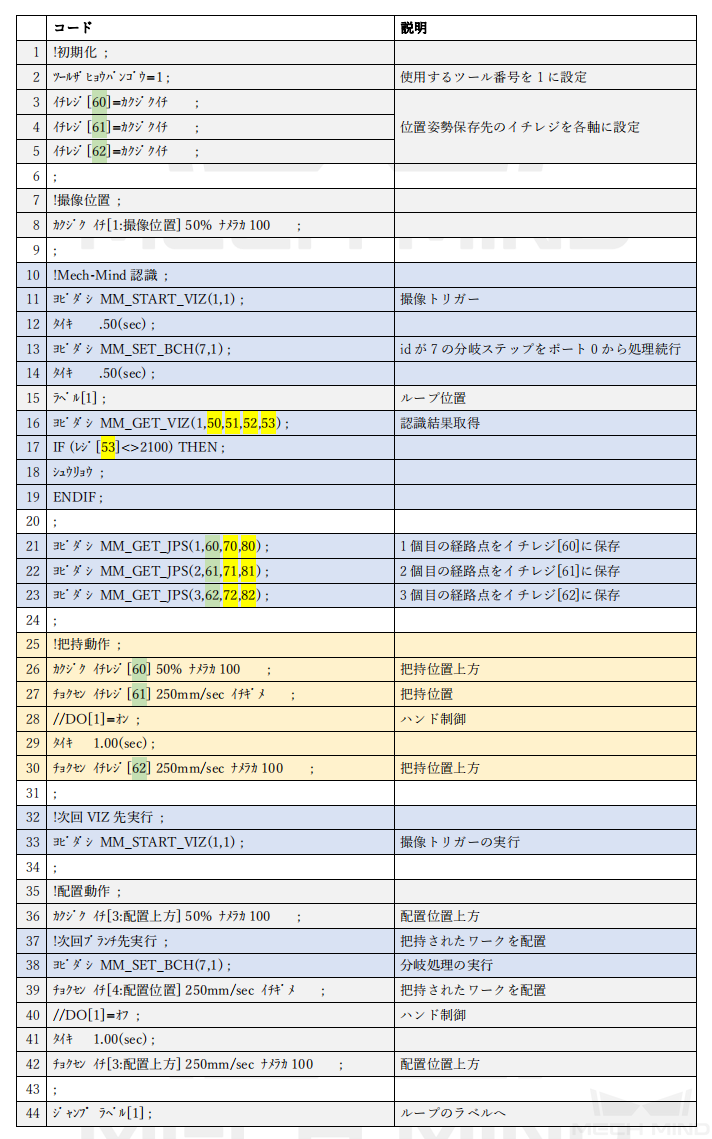
サンプル⑤「MM_S05_VIZブンキ」は、通常のMech-Vizを利用したフロー(サンプル②)を元に、Mech-Vizステップ 「メッセージによって異なる分岐を実行」 と連動して、計画する経路を複数種類の中から都度設定する時に使用していましたが、連続して動作させる場合には撮像と分岐タイミングの調整することでサイクルタイムの短縮が見込めます。
-
このサンプルでは把持後配置位置への移動中に撮像を行い、配置位置の上方に到着した時点でVizの分岐処理を行っています。撮像タイミングや経路は、撮像時間、認識時間、ロボット移動距離、移動方式などから影響を受けます。そのため実際の導入時には個別調整が必要となります。


レジスタ一覧
データ |
内容 |
出元 |
サンプルで使用 |
イチ 1 |
撮像位置 |
教示 |
〇 |
イチ 3 |
配置上方位置 |
教示 |
〇 |
イチ 4 |
配置位置 |
教示 |
〇 |
ラベル 1 |
ループ |
- |
〇 |
レジ 50 |
全ての経路点を受け取ったか否か |
MM_GET_VIZ |
✕ |
レジ 51 |
受け取った経路点の数 |
MM_GET_VIZ |
〇 |
レジ 52 |
認識結果が受け取った経路点における順番 |
MM_GET_VIZ |
✕ |
レジ 53 |
ステータスコード |
MM_GET_VIZ |
〇 |
レジ 70-72 |
ラベル情報 |
MM_GET_JPS |
✕ |
レジ 80-82 |
速度 |
MM_GET_JPS |
✕ |
イチレジ60-62 |
経路点(各軸) |
MM_GET_JPS |
〇 |