認識したラベル情報をもとに、ツール切替&動作分岐
概要
-
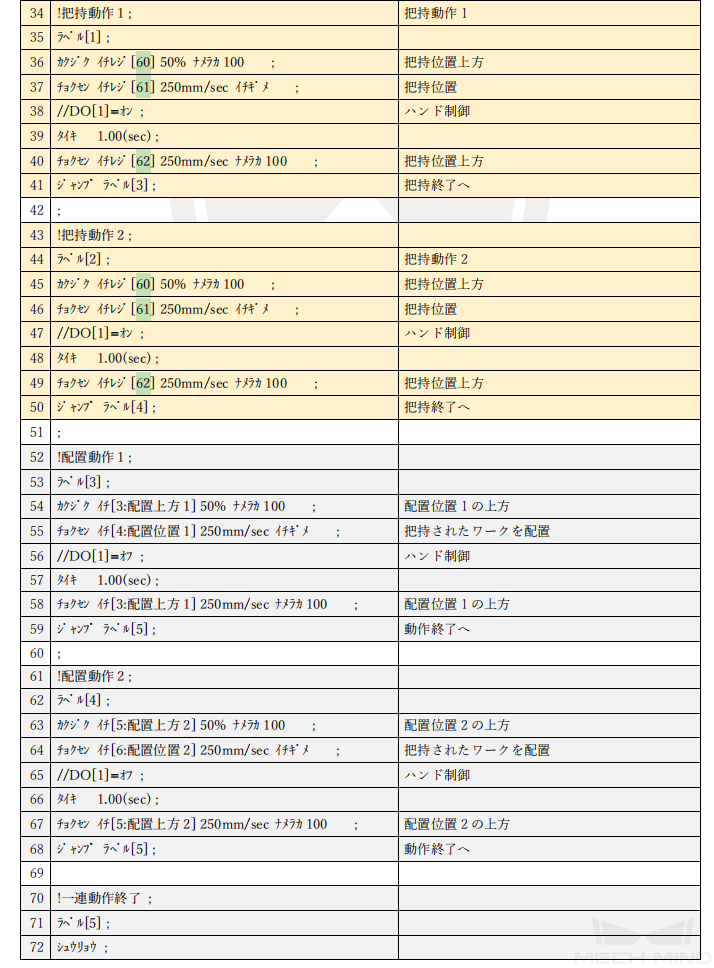
形状が複雑なワークに対して、または把持成功率を向上させる際、内径把持と外径把持に分けてそれぞれ把持点を設定して、異なる進入角度・距離から把持する戦略がよく使用されます。
-
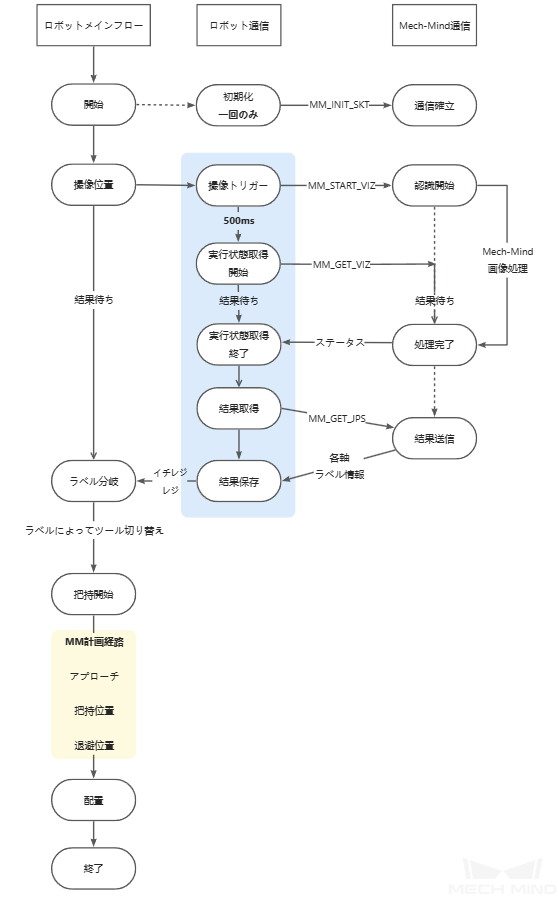
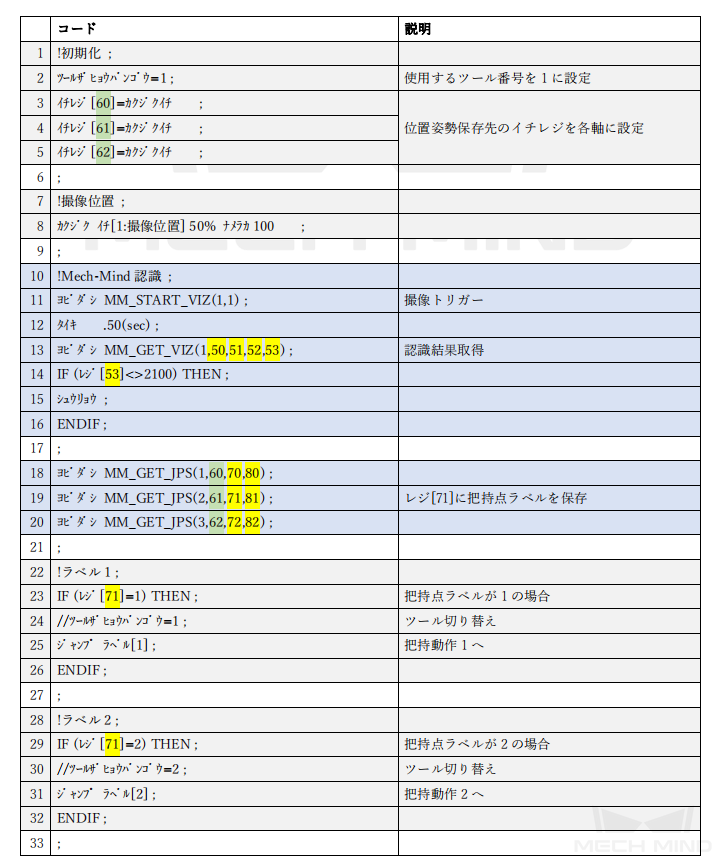
Mech-Vizの結果取得コマンドMM_GET_VIZ(a,b,c,d,e)は、全経路点において把持点となるインデックスをレジ[d]に保存します。その後、全経路点をコマンド MM_GET_JPSで取得してから、把持点のラベルに基づいて処理を分岐させます。
-
Mech-Vizの把持動作に限らず、Mech-Visionで認識したワークが白か黒か、裏か表か、こういった情報を取得する時もラベルから判別できます。通常1個の位置姿勢のみ使用するため、コマンドMM_GET_JPS(a,b,c,d)でラベルをレジ[c]に保存します。
-
サンプル⑦「MM_S07_ラベルブンキ」は、Mech-Vizが計画した経路を For 文で取り出し、把持点のラベルによって異なる処理を行います。ただし、ラベルはロボットのレジに送信されます。そのため文字ではなく数字のラベルを使用してください。


レジスタ一覧
データ |
内容 |
出元 |
サンプルで使用 |
イチ 1 |
撮像位置 |
教示 |
〇 |
イチ 3 |
配置上方位置 1 |
教示 |
〇 |
イチ 4 |
配置位置 1 |
教示 |
〇 |
イチ 5 |
配置上方位置 2 |
教示 |
〇 |
イチ 6 |
配置位置 2 |
教示 |
〇 |
ラベル 1 |
把持動作 1 |
- |
〇 |
ラベル 2 |
把持動作 2 |
- |
〇 |
ラベル 3 |
配置動作 1 |
- |
〇 |
ラベル 4 |
配置動作 2 |
- |
〇 |
ラベル 5 |
終了 |
- |
〇 |
レジ 50 |
全ての経路点を受け取ったか否か |
MM_GET_VIZ |
✕ |
レジ 51 |
受け取った経路点の数 |
MM_GET_VIZ |
〇 |
レジ 52 |
認識結果が受け取った経路点における順番 |
MM_GET_VIZ |
✕ |
レジ 53 |
ステータスコード |
MM_GET_VIZ |
〇 |
レジ 70-72 |
ラベル情報 |
MM_GET_JPS |
〇 |
レジ 80-82 |
速度 |
MM_GET_JPS |
✕ |
イチレジ60-62 |
経路点(各軸) |
MM_GET_JPS |
〇 |