撮像タイミングの最適化(サキジッコウ・サキジッコウキョリ)
概要
-
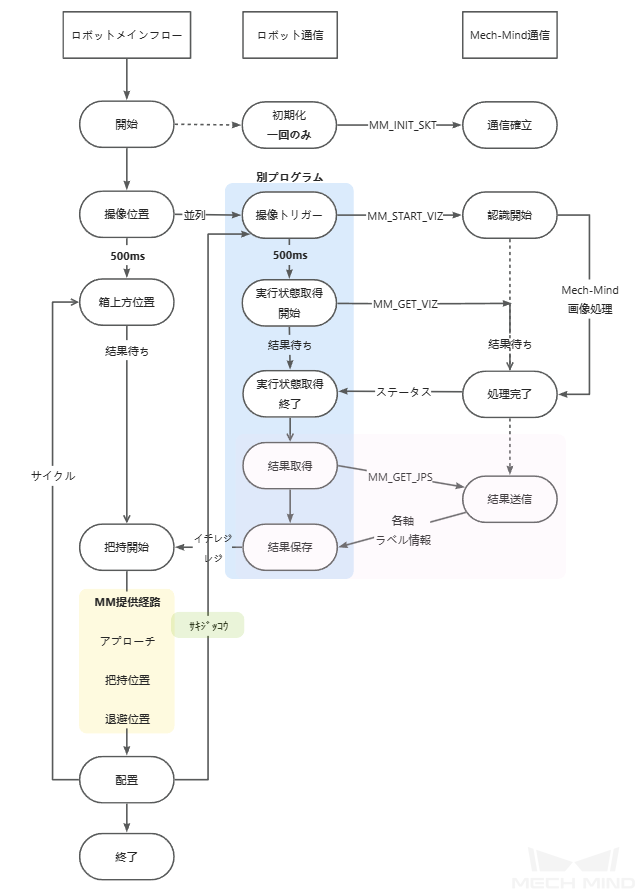
ビジョンの並列処理と次回撮像タイミング と同じように全体タクト最適化のため、把持が完了してロボット、ハンド、ケーブルなどが認識を妨げない位置まで移動したタイミングで、次の撮像を行います。通常はワークを配置する直前に入れます。
-
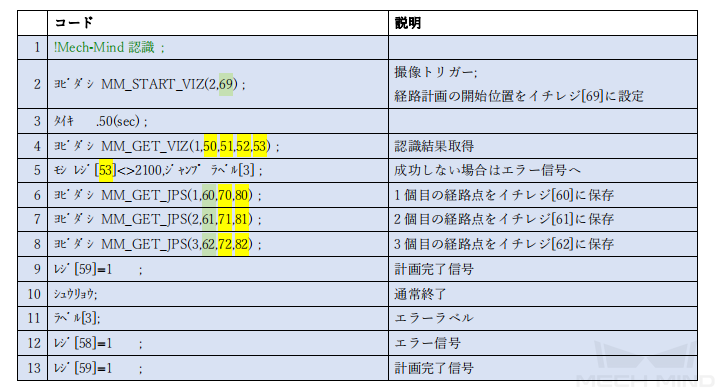
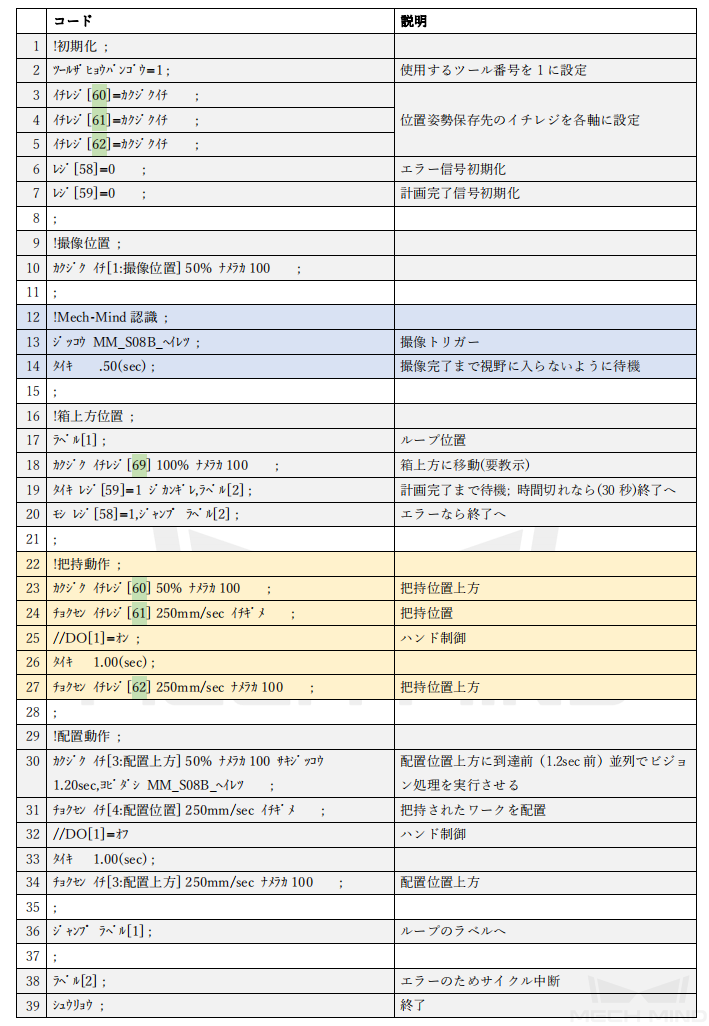
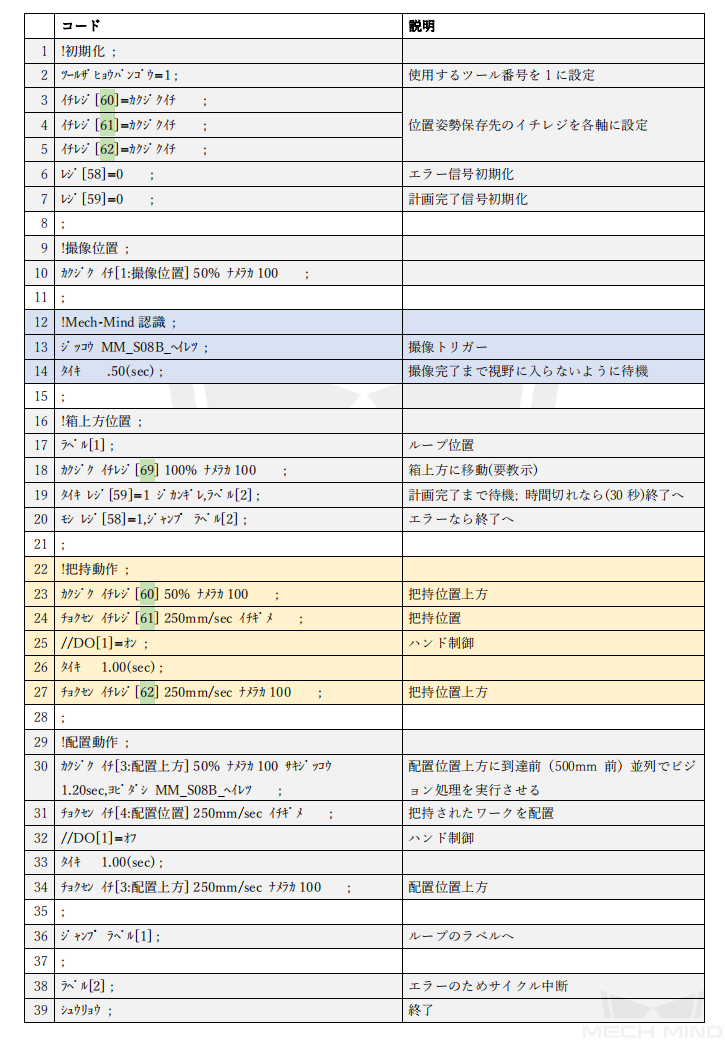
サンプル⑩は、メインプログラムの「MM_S10_サキジッコウ」または「MM_S10_サキジッコウキョリ」と撮像プログラム「MM_S08B_ヘイレツ」に分けて、上述のタイミングでFanucの「サキジッコウ」命令で撮像を並列処理させています。
-
撮像タイミングや経路の最適化戦略は、撮像時間、認識時間、ロボット移動距離、移動方式などから影響を受けます。そのため個別調整が必要です。


レジスタ一覧
データ |
内容 |
出元 |
サンプルで使用 |
イチ 1 |
撮像位置 |
教示 |
〇 |
イチ 3 |
配置上方位置 |
教示 |
〇 |
イチ 4 |
配置位置 |
教示 |
〇 |
ラベル 1 |
ループ |
- |
〇 |
ラベル 2 |
終了 |
- |
〇 |
ラベル 3 |
計画が成功しない場合 |
- |
〇 |
レジ 50 |
全ての経路点を受け取ったか否か |
MM_GET_VIZ |
✕ |
レジ 51 |
受け取った経路点の数 |
MM_GET_VIZ |
✕ |
レジ 52 |
認識結果が受け取った経路点における順番 |
MM_GET_VIZ |
✕ |
レジ 53 |
ステータスコード |
MM_GET_VIZ |
〇 |
レジ 58 |
エラー信号 |
- |
〇 |
レジ 59 |
計画完了信号 |
- |
〇 |
レジ 70-72 |
ラベル情報 |
MM_GET_JPS |
✕ |
レジ 80-82 |
速度 |
MM_GET_JPS |
✕ |
イチレジ60-62 |
経路点(各軸) |
MM_GET_JPS |
〇 |
イチレジ69 |
箱上方位置 |
教示 |
〇 |