Kawasaki (川崎)标准接口通信配置
本节介绍如何配置 Kawasaki 标准接口通信。
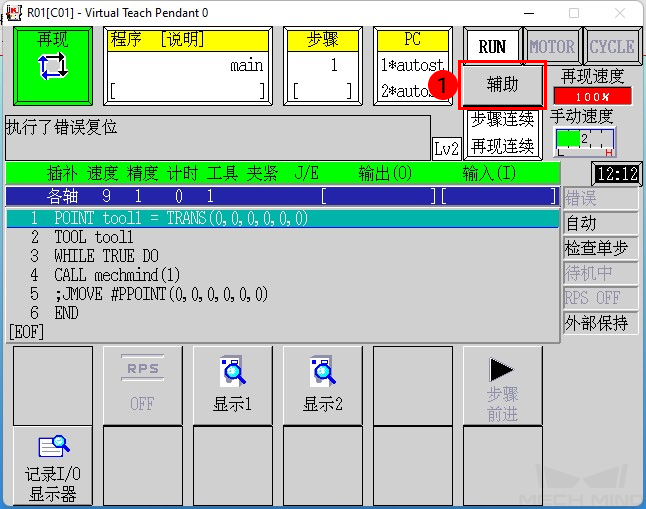
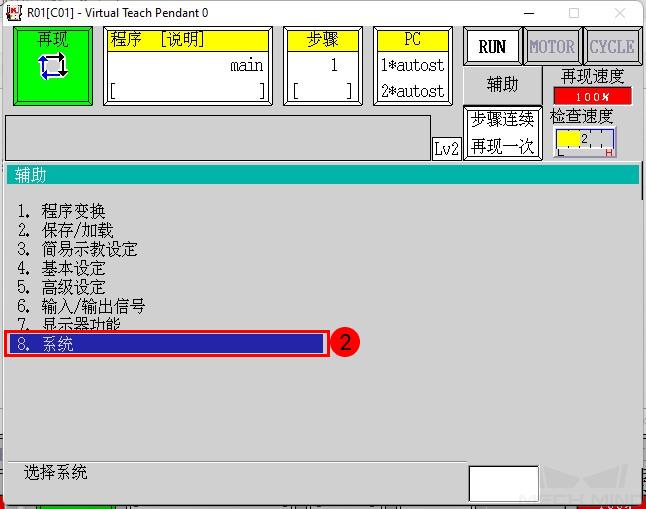
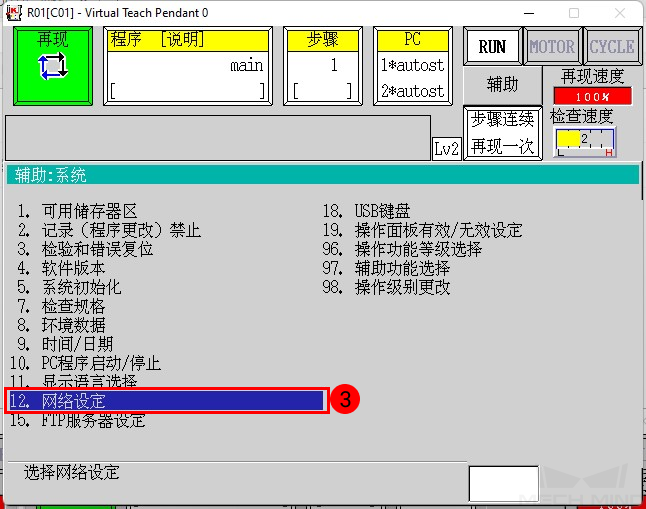
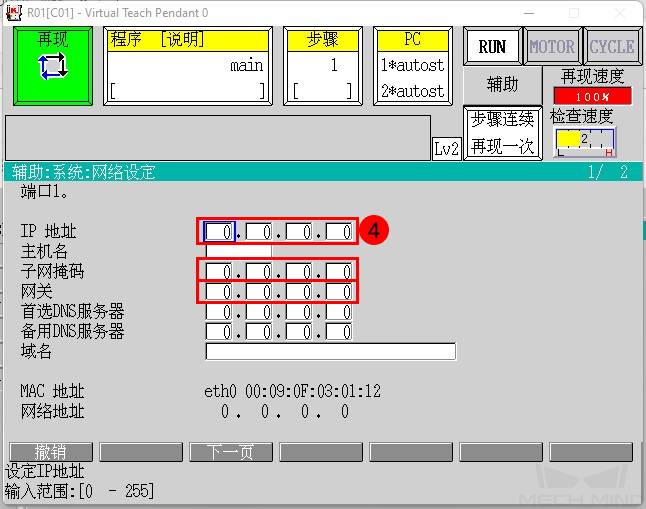
建立网络连接



设置 Mech-Vision 中“机器人与通信配置”
-
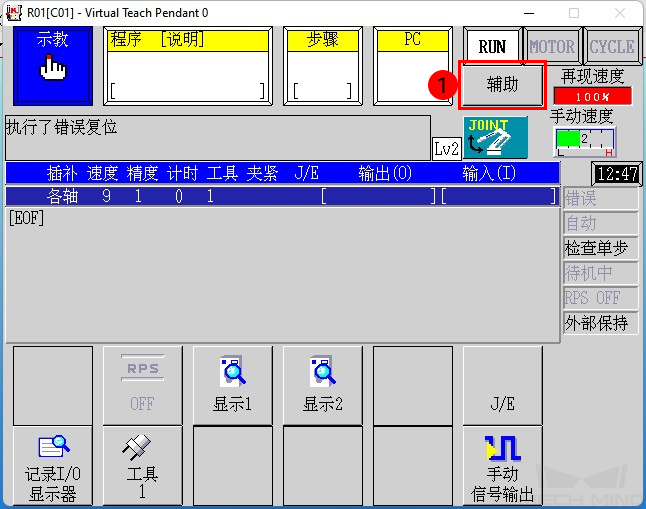
单击 Mech-Vision 工具栏中 机器人与接口配置 。
-
单击 选择机器人 下拉框,选择 品牌机器人 ,然后单击 选择机器人型号 ,选择具体 Kawasaki 机器人型号,单击 下一步 。
-
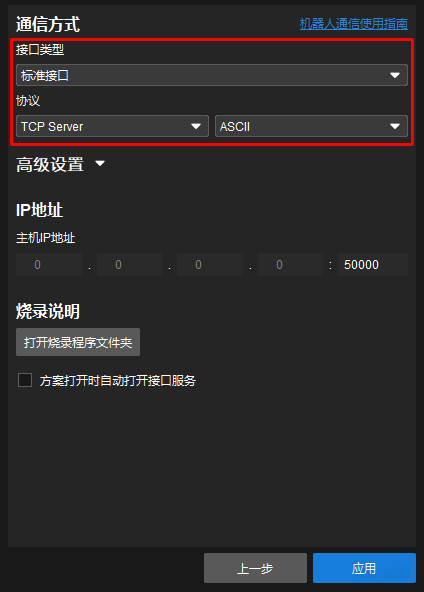
在 通信方式 下,接口类型选择 标准接口 ,协议选择 TCP Server ,协议格式选择 ASCII ,最后单击 应用 。
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

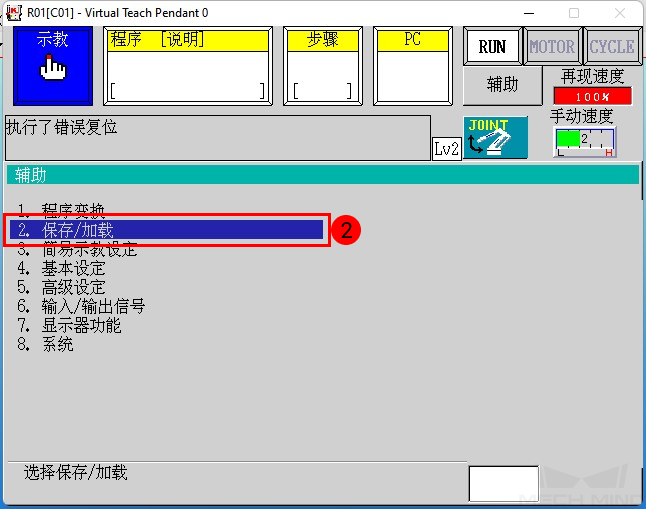
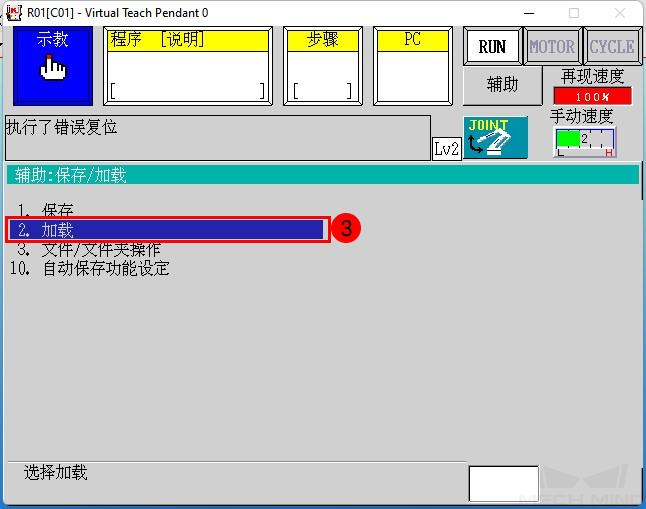
烧录文件至机器人中
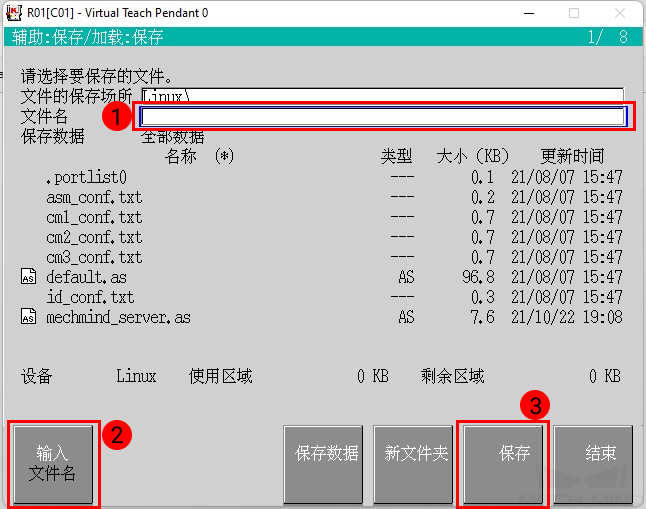
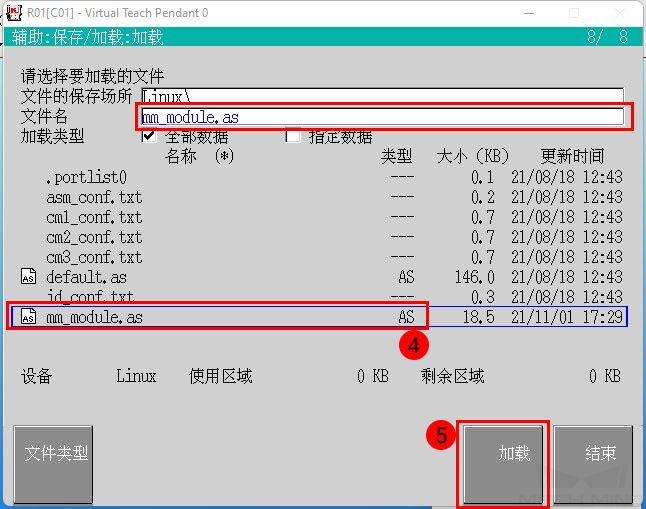
选择待烧录的文件
在梅卡曼德系统软件的安装目录 Mech-Center\Robot_Interface\KAWASAKI 文件夹下,将 mm_module.as 文件复制至 U 盘的根目录中,然后将 U 盘插入控制器面板的 USB 接口。



测试机器人连接状态
选择和修改机器人通信测试程序
|
在执行以下 vision_sample_1 程序前,需满足以下条件:
|
-
示教器上选择前台程序 vision_sample_1 ,单击程序窗口,在列表中选择程序 vision_sample_1 ,按示教器上
登录键确认。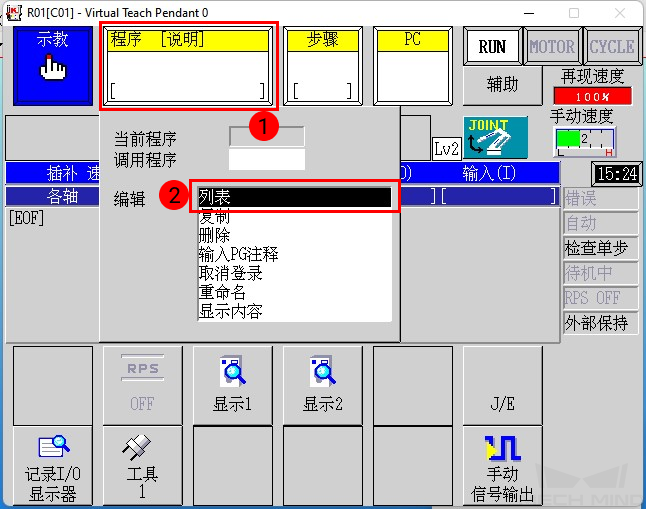
前台程序添加完成后如下图所示。

-
修改 vision_sample_1 程序的第 10 行,将 127, 0, 0, 1 更改为实际工控机的 IP 地址,将 50000 改为实际 Mech-Vision 中设置的主机端口号。
-
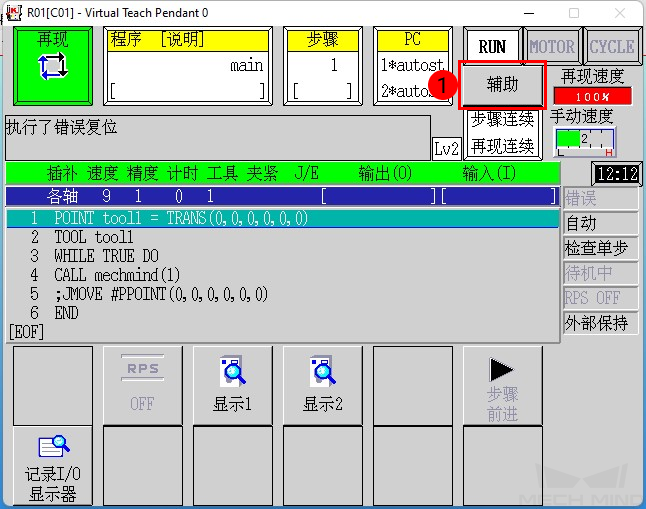
按下示教器上
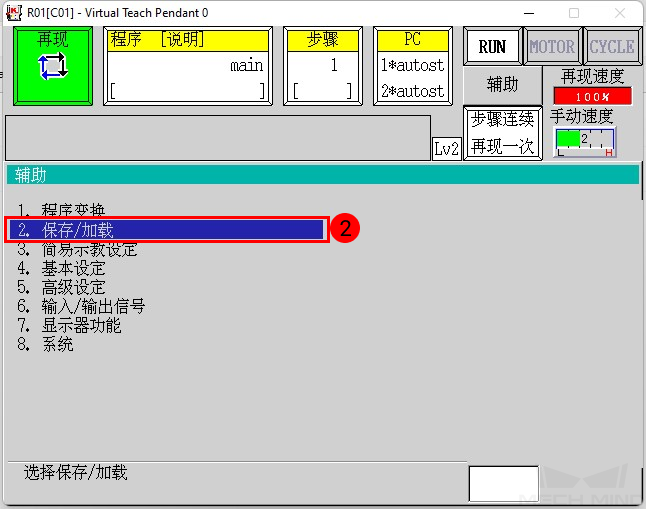
J/E键,在弹出菜单中,单击选择 程序编辑画面 ,按登录键确认。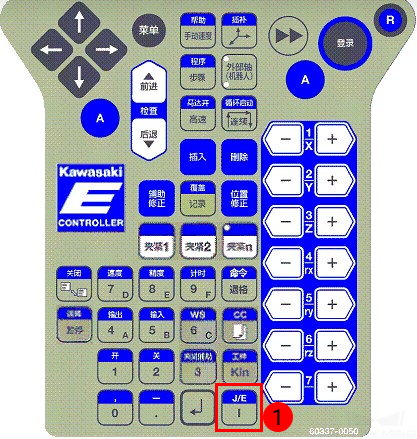

-
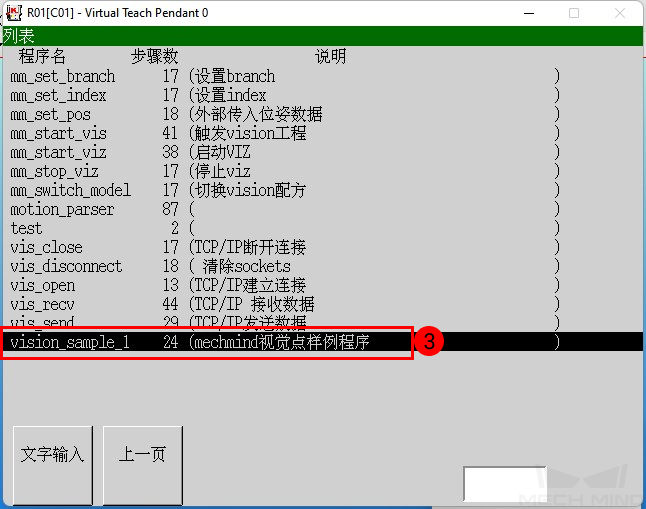
在程序显示列表中选择 vision_sample_1 , 按
登录键确认。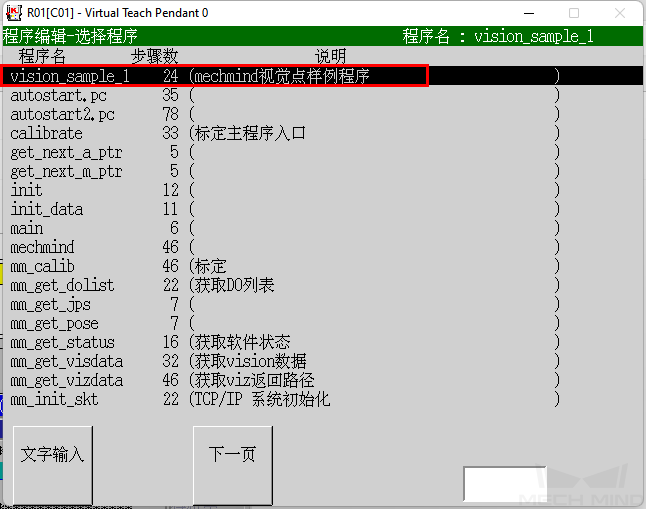
-
使用示教器上的方向键,将红色框选框移动到第 10 行右侧,按
登录键确认。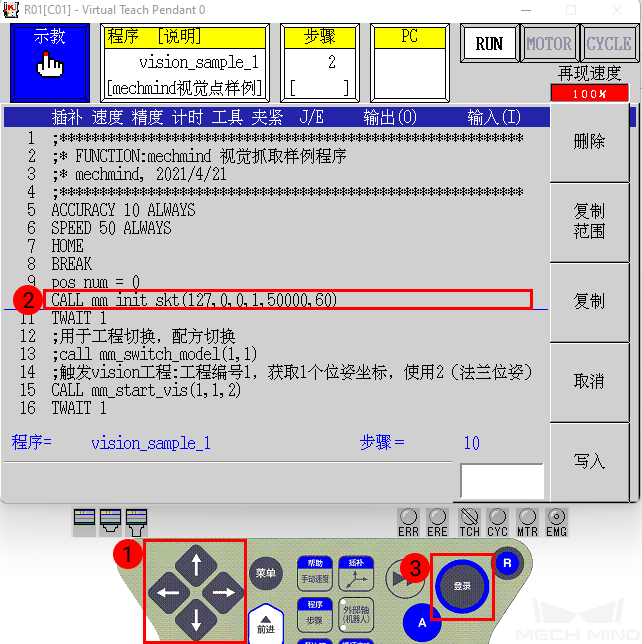
-
使用示教器上的方向键,移动输入框中的光标到相应位置,将 127,0,0,1 修改为工控机 IP 地址,将 50000 修改为 Mech-Center 软件中设置的主机端口号。修改完成后按
登录键确认,然后按R键退出。
-
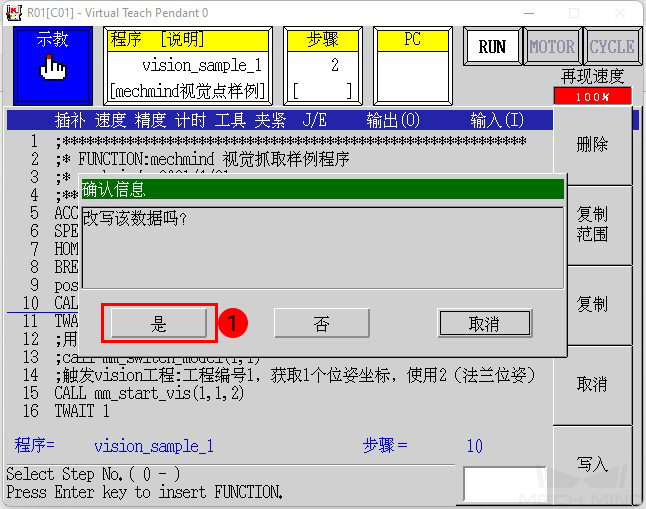
在弹出的确认窗口中选择 是 ,然后选择 关闭。
-
运行测试程序
-
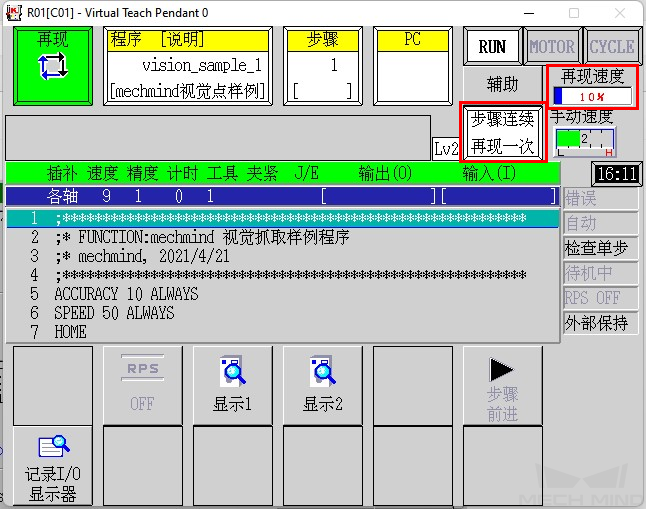
将控制器切换到 再现模式 ,调整再现速度为 10 % 。再现模式调整为 步骤连续,再现一次 。
-
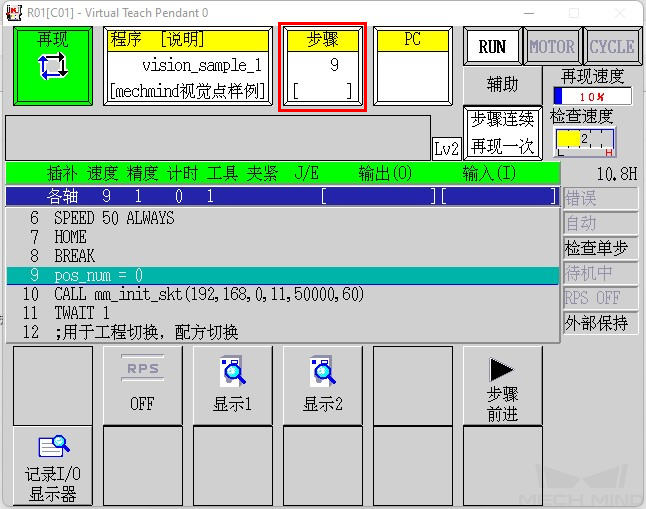
如果从步骤 1 开始执行,机器人会先回到 Home 点,如果测试时不想机器人回到 HOME 点,而是令机器人在当前位置保持不动,只是测试通信连接,那么把步骤 1 改成 9 ,按
登录键确认,即可跳过第 7 行命令。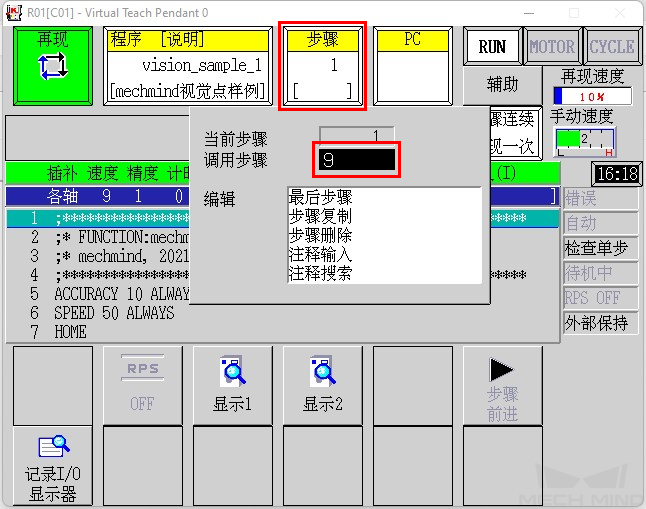
-
在示教器上按住
A键,单击 MOTOR,使 MOTOR 灯亮起。在示教器上按住A键,单击 CYCLE,使 CYCLE 灯亮起。如果RUN 没有亮起,依次按下A 键 → 暂停/运转键。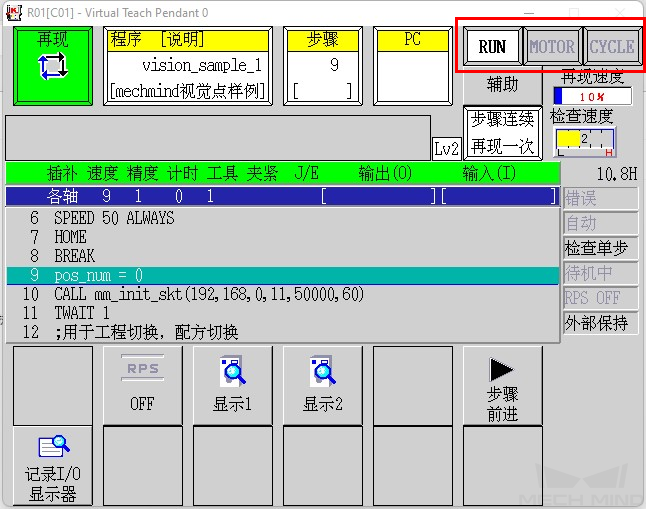
-
若连接成功,则 Mech-Vision 日志窗口的 Console 标签页下会出现相关提示。
