STAUBLI(史陶比尔)
本节介绍如何主控 STAUBLI 机器人。
|
用户密码:
|
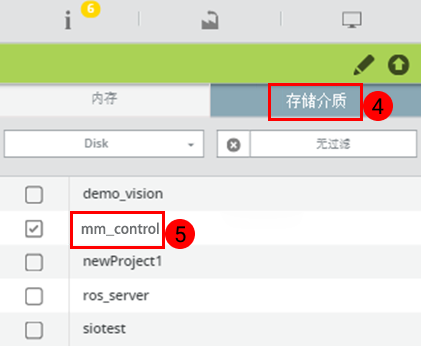
烧录文件至机器人中
烧录前的准备
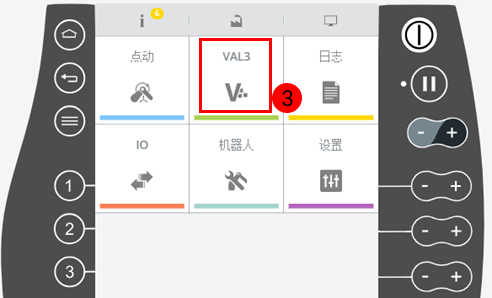
在拷贝烧录文件之前需要配置 IO ,在示教器中找到 IO 板,查看 IO 板编号。
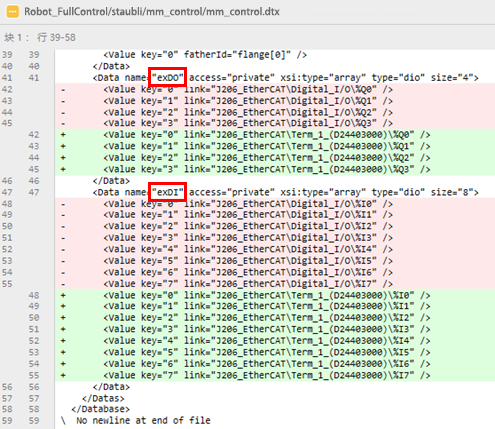
STAUBLI 机器人官方的 etherCAT IO 板有 4 个 DO(exDO)和 8个 DI(exDI),需像下图一样修改 mm_control 文件夹中mm_control.dtx 文件配置 IO ,将下图中的 Digital_I/O 改成 Term_1_(D24403000) 。
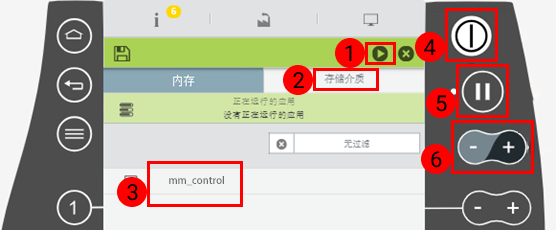
程序烧录
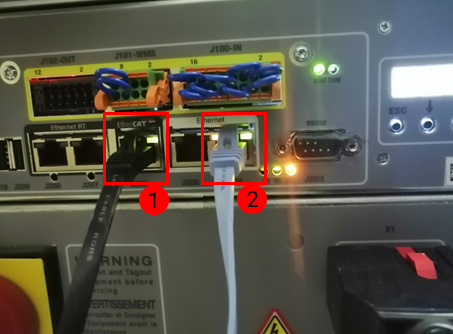
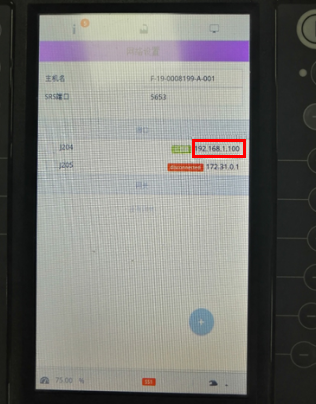
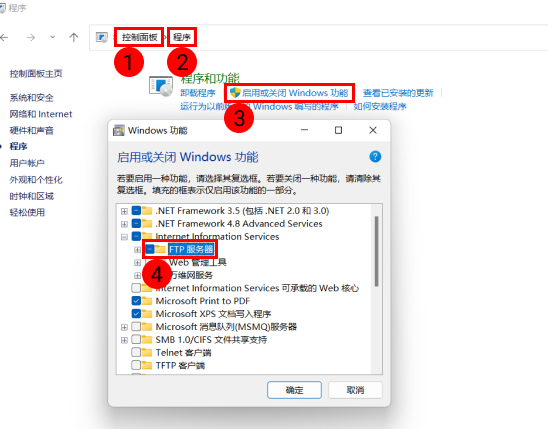
由于机器人通过 ftp 方式拷贝程序,所以首先需使工控机 IP 地址与机器人 IP 地址位于同一网段下,确保工控机可以 ping 通机器人。 同时还要确保工控机开启了 ftp 服务。
其次执行以下程序:
-
备份并替换下列文件或文件夹:
-
ftp://192.168.0.254/usr/configs/J206_EtherCAT(IO 相关,该文件是使用的 STAUBLI 官方的 etherCAT IO 板,若使用其他品牌 IO 板需咨询 STAUBLI 技术支持进行配置,然后联系梅卡曼德开发人员修改程序)
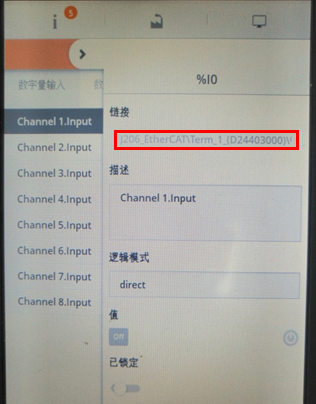
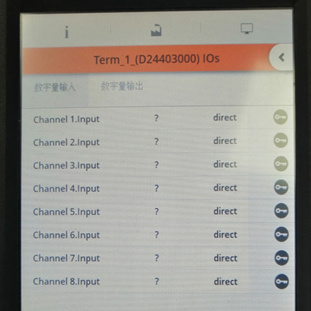
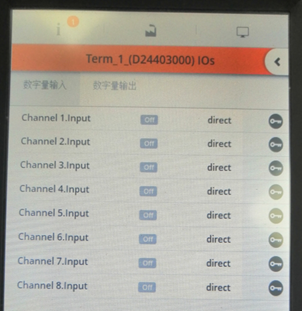
随后重启机器人,检查 IO 板是否配置成功。IO 板配置成功前后如下图所示:

测试机器人连接状态
检查 Mech-Center 设置并连接机器人
请参阅 测试机器人连接状态。