ELITE(艾利特)标准接口通信配置
本节介绍如何配置 ELITE 标准接口通信。
设置 Mech-Vision 中“机器人与通信配置”
-
单击 Mech-Vision 工具栏中 机器人与接口配置 。
-
单击 选择机器人 下拉框,选择 品牌机器人 ,然后单击 选择机器人型号 ,选择具体 ELITE 机器人型号,单击 下一步 。
-
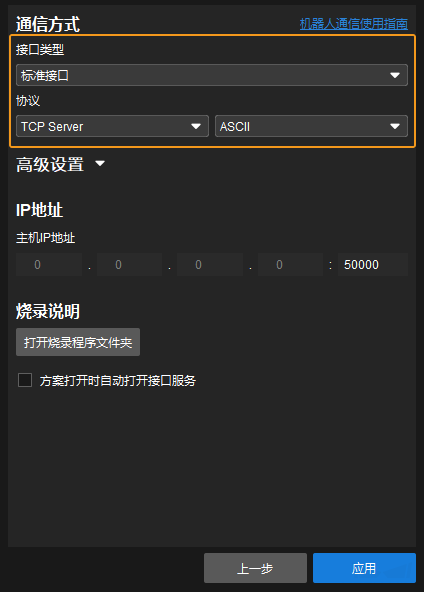
在 通信方式 下,接口类型选择 标准接口 ,协议选择 TCP Server ,协议格式选择 ASCII ,最后单击 应用 。
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

烧录标准接口程序
按照以下步骤将标准接口程序导入至机器人。
-
在梅卡曼德系统软件的安装目录
Mech-Center\Robot_Interface\ELITE文件夹下,将 rbctrl 文件夹复制到 U 盘中。 -
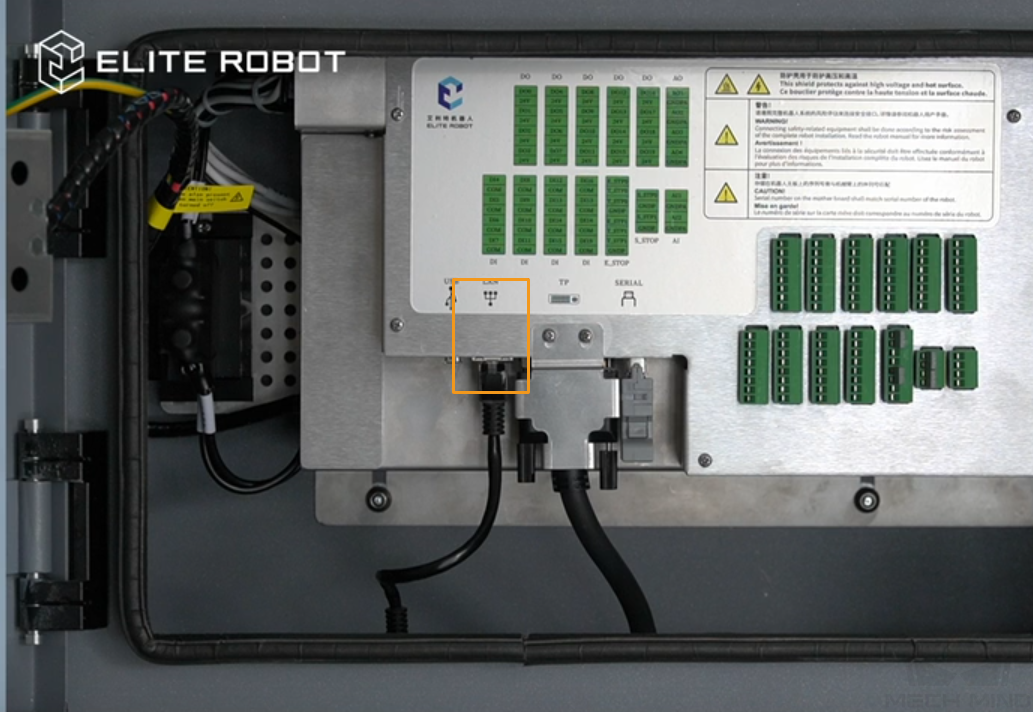
将 U 盘插到控制器上。
-
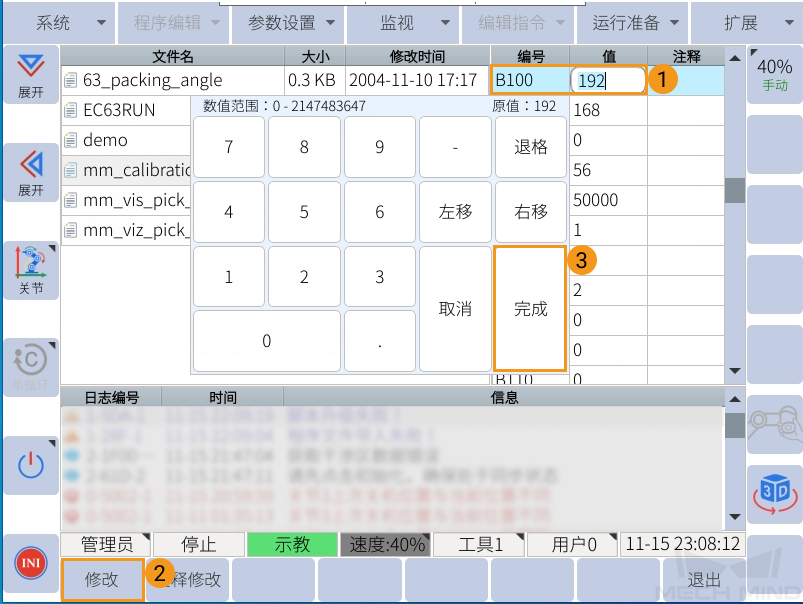
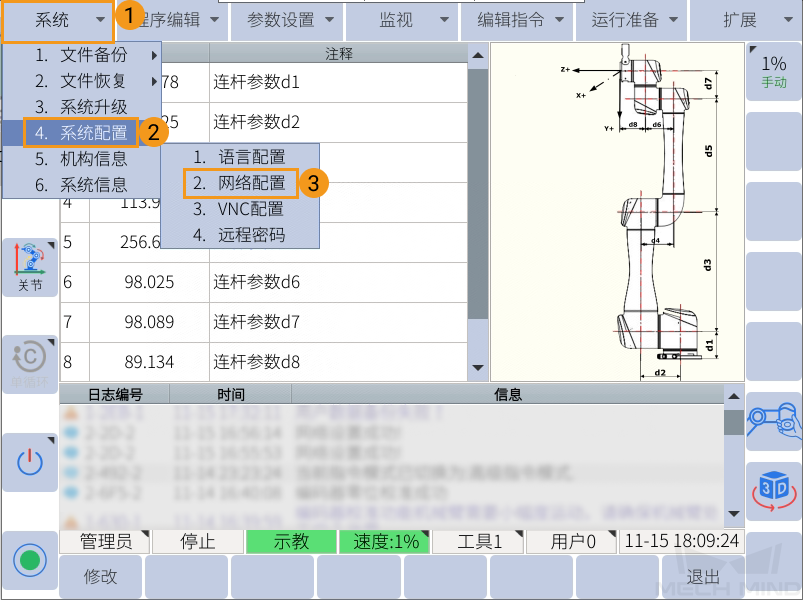
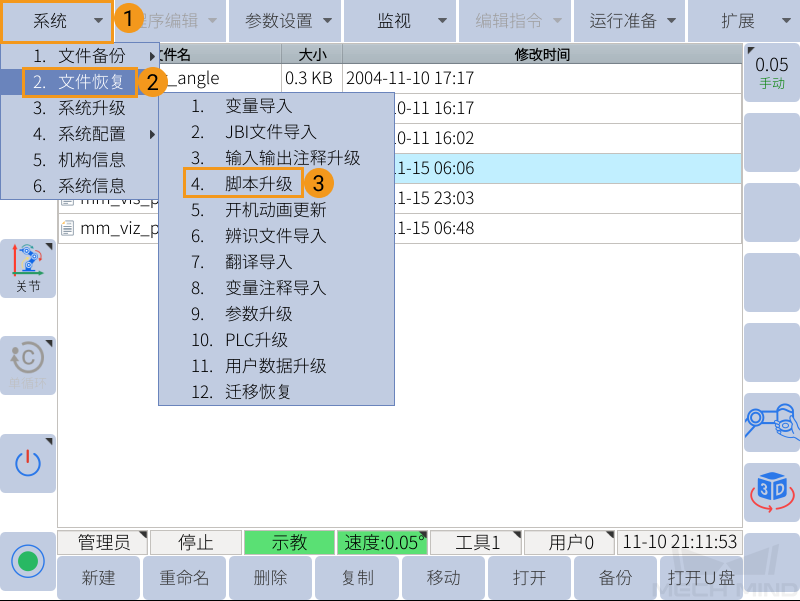
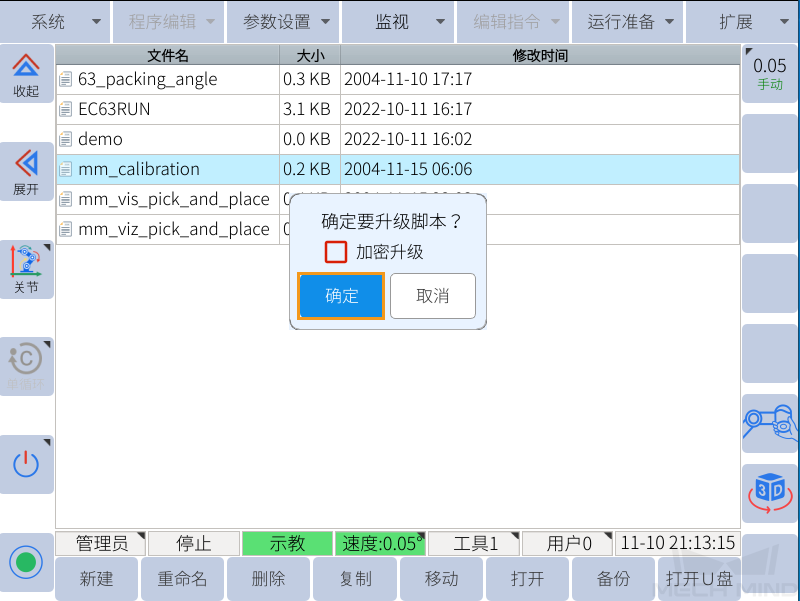
依次单击 ,然后在弹窗中选择 确定 。
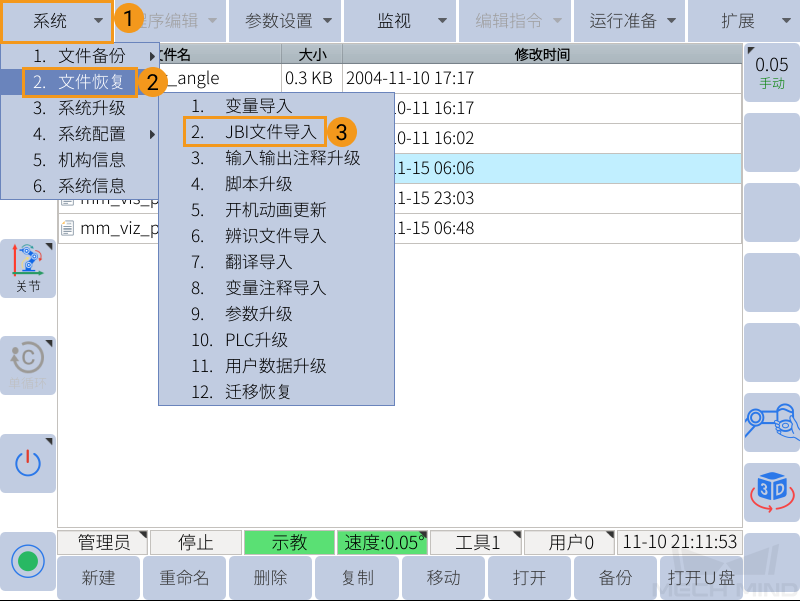
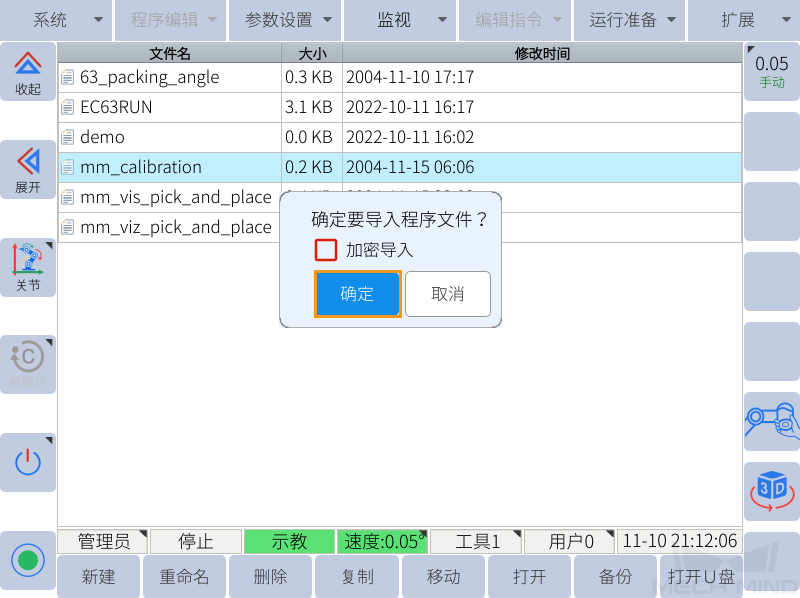
-
依次单击,然后在弹窗中选择 确定 。
-
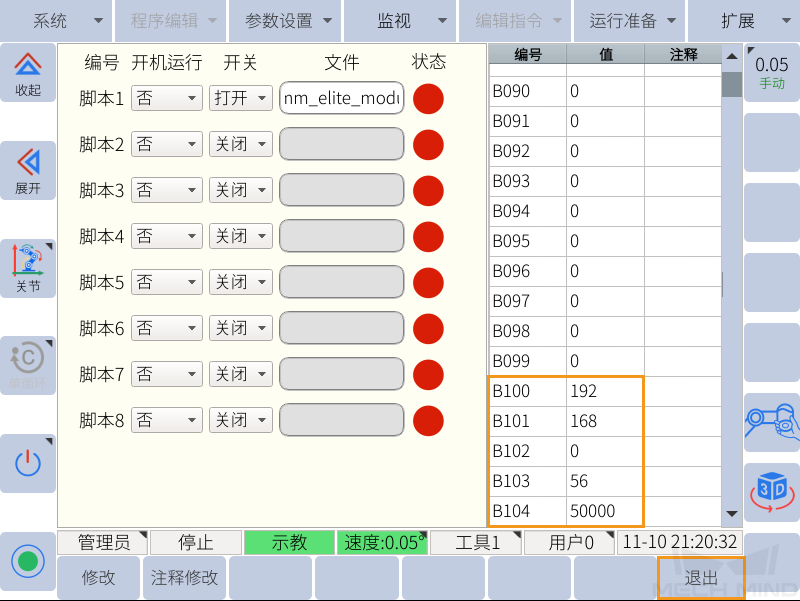
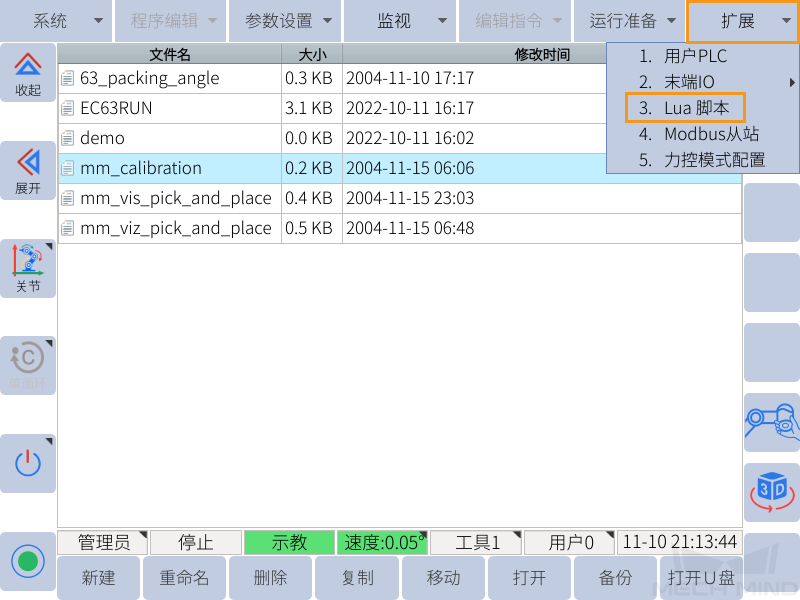
依次单击。
-
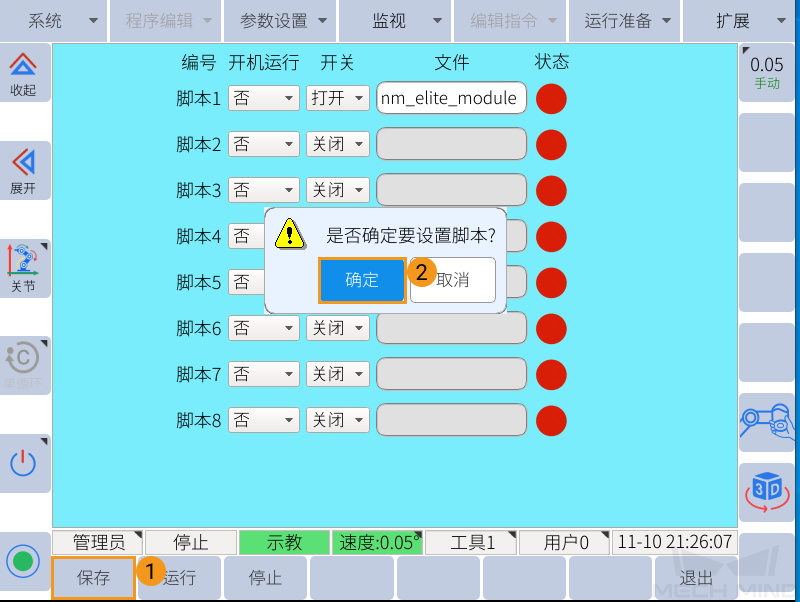
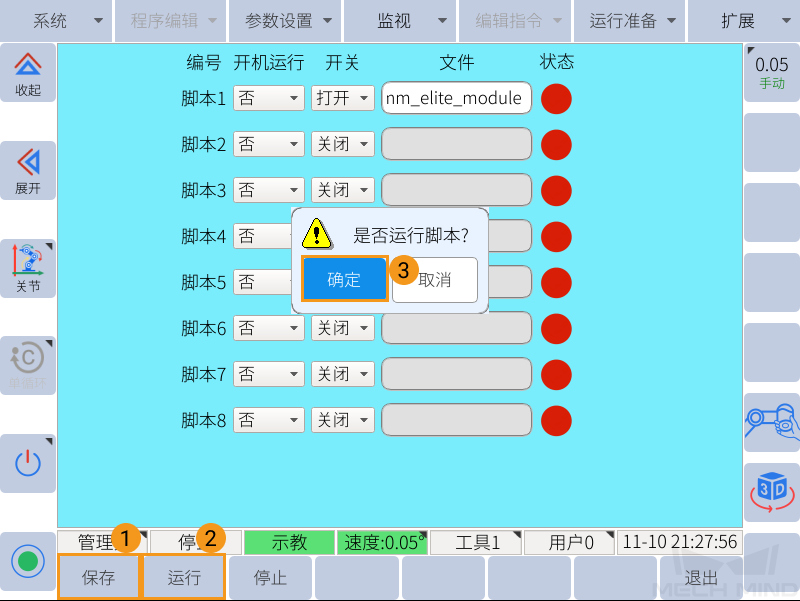
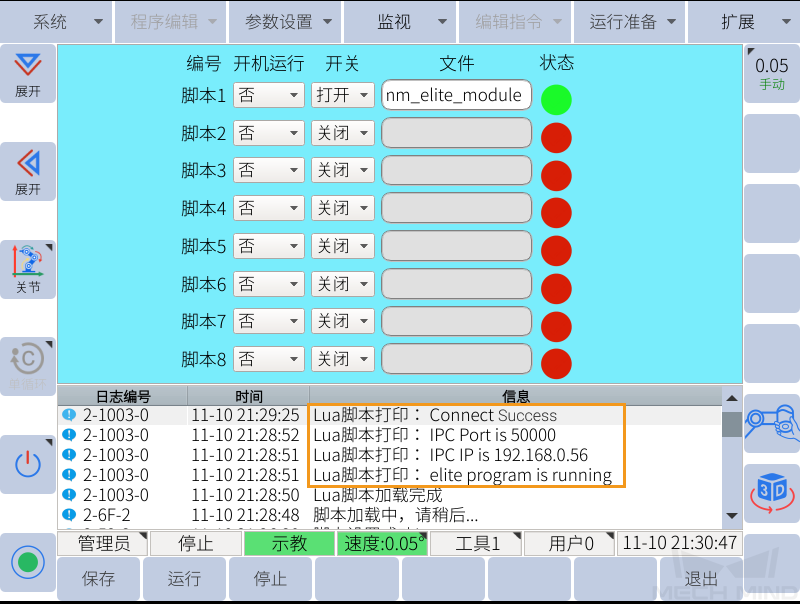
打开脚本1的开关,选择 mm_elite_module 文件。