AUBO (遨博)
本节介绍如何主控 AUBO 机器人。

测试机器人连接状态
请参阅 测试机器人连接状态。
报错处理
如果无法成功连接机器人,且报错: DLL load failed: %1 不是有效的 Win 32 应用程序 , 请检查工控机上的 C 运行库是否完整,完整的 C 运行库如下图所示。
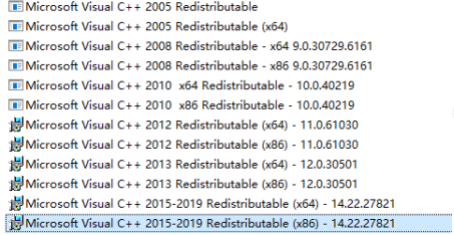
若不完整,请使用 vc 运行库修复 DirectX Repair V3.9 修复 。
本节介绍如何主控 AUBO 机器人。
请参阅 测试机器人连接状态。
如果无法成功连接机器人,且报错: DLL load failed: %1 不是有效的 Win 32 应用程序 , 请检查工控机上的 C 运行库是否完整,完整的 C 运行库如下图所示。
若不完整,请使用 vc 运行库修复 DirectX Repair V3.9 修复 。