JAKA(节卡)自带程序实现标准接口
本节介绍使用节卡自带的程序插件编写标准接口程序,用户可在实现的样例上做简单修改便可使用。本节涉及的样例程序对机器人控制器版本无要求。
导入程序
样例程序位于梅卡曼德系统软件的安装目录 Mech-Center\Robot_Interface\JAKA 文件夹下,样例程序的导入可参考 《JAKA(节卡)标准接口程序烧录》中导入样例程序 。
使用 Mech-Vision 进行视觉识别并获取结果
在 编程控制 界面,打开 烧录 的 mmVis 程序。
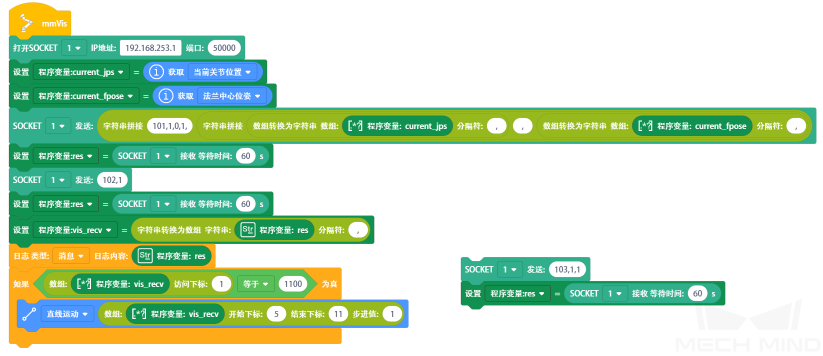
程序说明
-
第 1 步:机器人与工控机建立 Socket 连接。此处的 IP 地址为工控机的 IP 地址,需与机器人 IP 位于同一网段。
-
第 2 步:获取机器人当前关节角,并保存至 current_jps 变量。
-
第 3 步:获取机器人当前法兰位姿,并保存至 current_fpose 变量。
-
第 4 步:发送启动 Mech-Vision 工程的指令,具体参数设置可参考 101 指令 。
-
第 5 步:接收 101 指令 返回的状态码,并保存至 res 变量。
-
第 6 步:发送获取视觉目标点的指令,具体参数设置可参考 102 指令 。
-
第 7 步:接收 102 指令 返回的数据,并保存至 res 变量。
-
第 8 步:将第 7 步接受到的数据由字符串形式转换为数组形式,并保存至 vis_recv 变量。
-
第 9 步:打印日志。
-
第 10 步:判断 vis_recv 下标为 1 的值是否为 1100。1100 表示成功获取视觉目标点。
-
第 11 步:直线运动到第一个视觉目标点。
节卡直线运动需要传入工具位姿值,关节运动需要传入关节值。
使用 Mech-Viz 规划路径
在 编程控制 界面,打开 mmViz 程序。
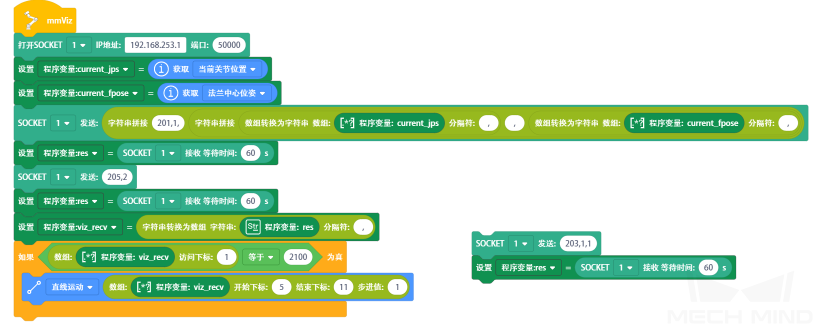
程序说明
-
第 1 步:机器人与工控机建立 Socket 连接。此处的 IP 地址为工控机的 IP 地址,需与机器人 IP 位于同一网段。
-
第 2 步:获取机器人当前关节角,并保存至 current_jps 变量。
-
第 3 步:获取机器人当前法兰位姿,并保存至 current_fpose 变量。
-
第 4 步:发送启动 Mech-Viz 工程的指令,具体参数设置可参考 201 指令 。
-
第 5 步:接收 201 指令 返回的状态码,并保存至 res 变量。
-
第 6 步:发送获取规划路径的指令,具体参数设置可参考 205 指令 。
-
第 7 步:接收 205 指令 返回的数据,并保存至 res 变量。
-
第 8 步:将第 7 步接受到的数据由字符串形式转换为数组形式,并保存至 viz_recv 变量。
-
第 9 步:判断 viz_recv 下标为 1 的值是否为 2100。2100 表示成功获取规划路径。
-
第 10 步:直线运动到第一个路径点。
节卡直线运动需要传入工具位姿值,关节运动需要传入关节值。
使用 Mech-Vision “路径规划”步骤获取规划路径
在 编程控制 界面,打开 mmVisPath 程序。
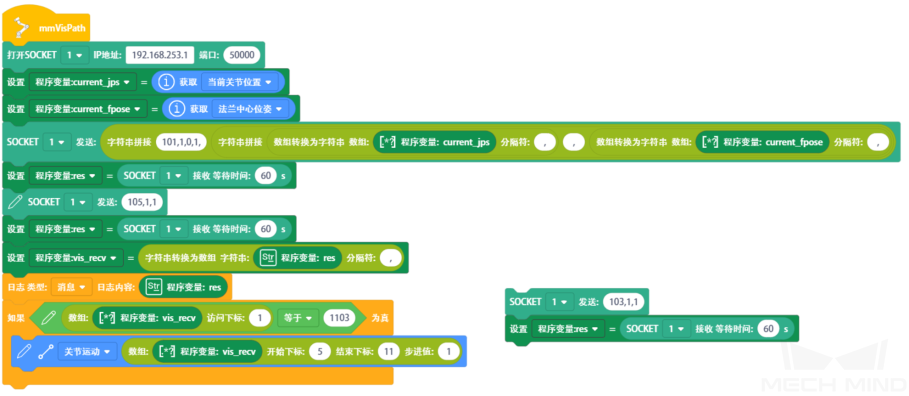
程序说明
-
第 1 步:机器人与工控机建立 Socket 连接。此处的 IP 地址为工控机的 IP 地址,需与机器人 IP 位于同一网段。
-
第 2 步:获取机器人当前关节角,并保存至 current_jps 变量。
-
第 3 步:获取机器人当前法兰位姿,并保存至 current_fpose 变量。
-
第 4 步:发送启动 Mech-Vision 工程的指令,具体参数设置可参考 101 指令 。
-
第 5 步:接收 101 指令 返回的状态码,并保存至 res 变量。
-
第 6 步:发送获取 Mech-Vision “路径规划”步骤结果的指令,具体参数设置可参考 105 指令 。
-
第 7 步:接收 105 指令 返回的数据,并保存至 res 变量。
-
第 8 步:将第 7 步接受到的数据由字符串形式转换为数组形式,并保存至 vis_recv 变量。
-
第 9 步:打印日志。
-
第 10 步:判断 vis_recv 下标为 1 的值是否为 1103。1103 表示成功获取 Mech-Vision “路径规划”步骤的结果。
-
第 11 步:直线运动到第一个路径点。
节卡直线运动需要传入工具位姿值,关节运动需要传入关节值。