ELITE(艾利特)标定操作流程
本节介绍 ELITE 机器人在与梅卡曼德视觉系统进行标准接口通信时如何完成自动标定流程。
|
在开始本节内容之前,请确保:
|
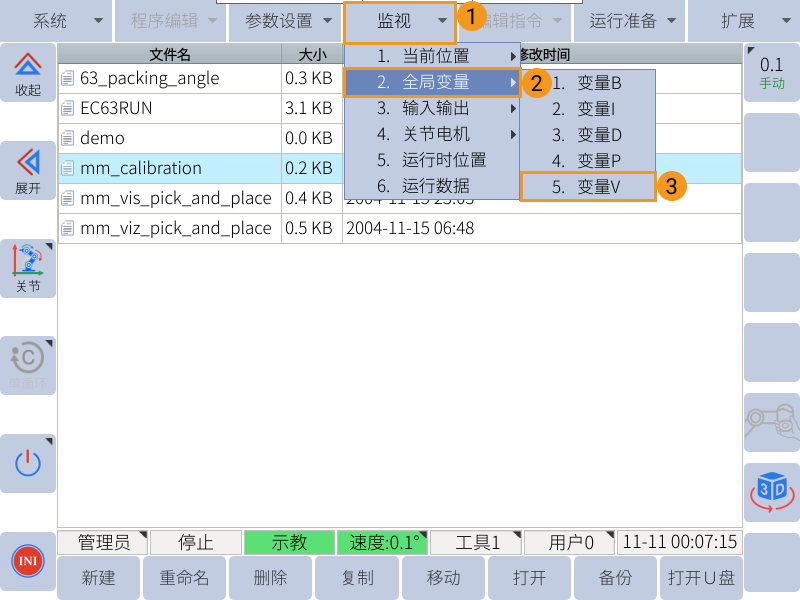
打开变量
标定点的工具中心点位姿(TCP)会保存在 V099 变量中,相应的关节角数据会保存在 P099 变量中。在开始标定前,请按照以下步骤打开变量V099和P099。
-
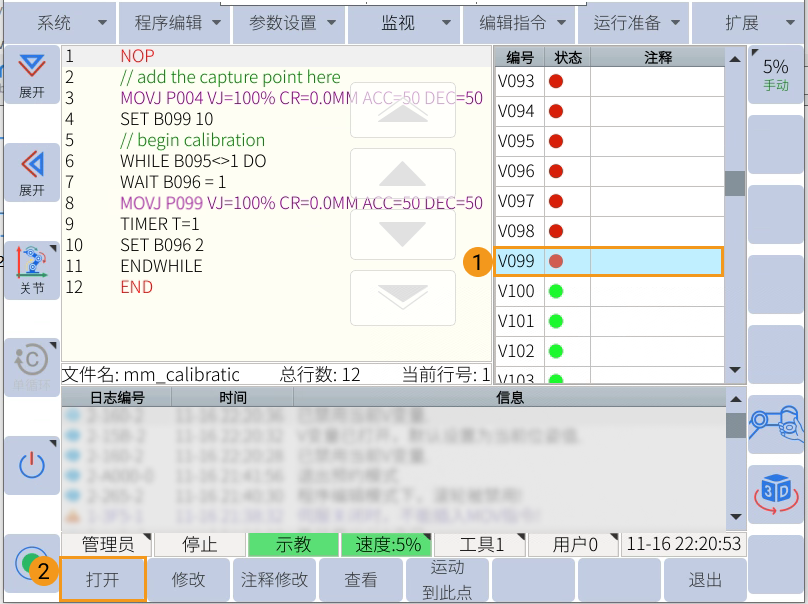
依次在示教器上单击,查看 V099 变量是否打开。状态栏图标显示为绿色表示打开,红色表示未打开。
若变量未打开,选中该变量,单击屏幕左下角的 打开 按钮。
-
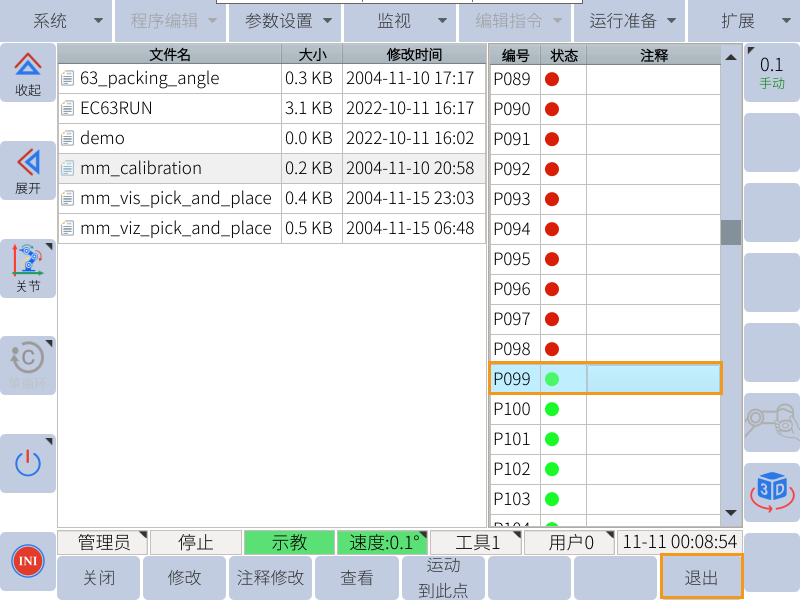
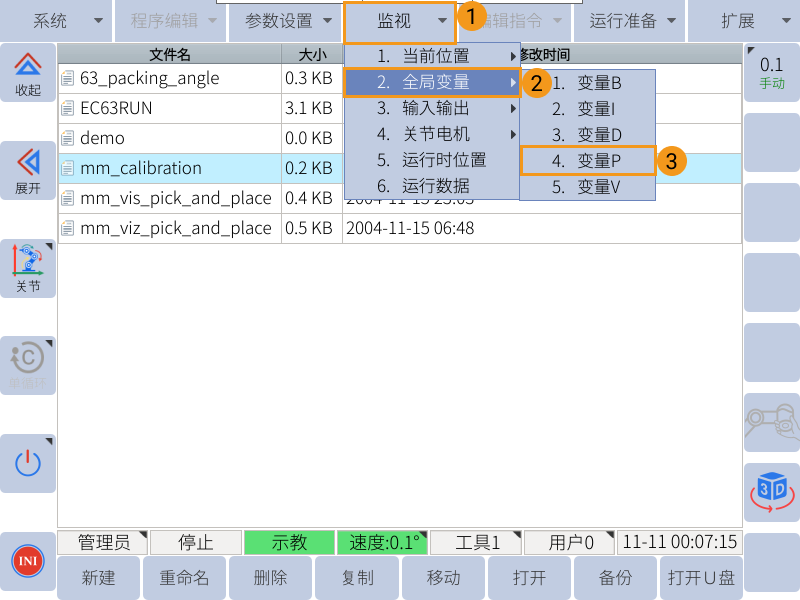
同理,依次在示教器上单击,将 P099 变量打开,然后单击 退出 回到主页面。
示教标定起始点
-
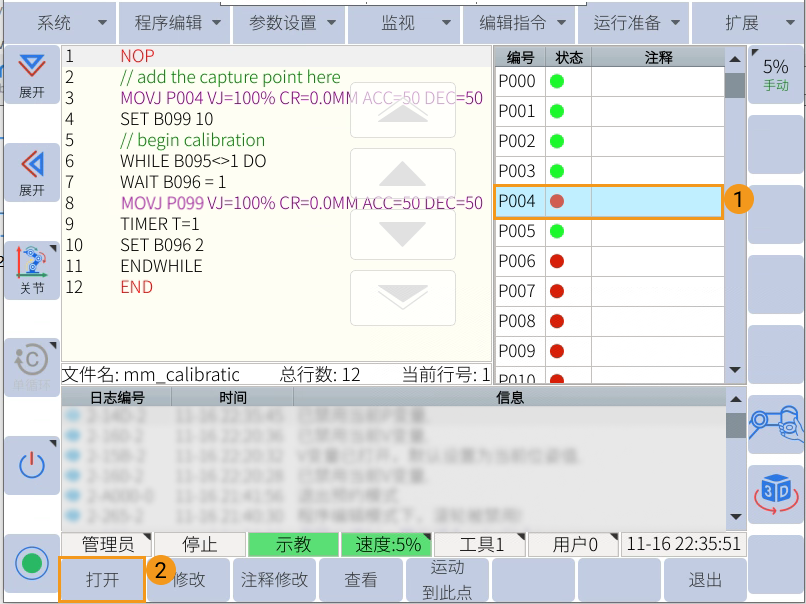
选择 mm_calibration 程序,单击 打开。

-
将机器人手动移动到标定初始位置。
-
依次在示教器上单击,选中您想要存入示教点的变量(此例中标定初始点被存入 P004 变量)。
-
若该变量处于关闭状态,单击 打开 存入示教点。
-
若该变量已经处于打开状态,先单击 关闭,再次 打开 存入示教点。
-
-
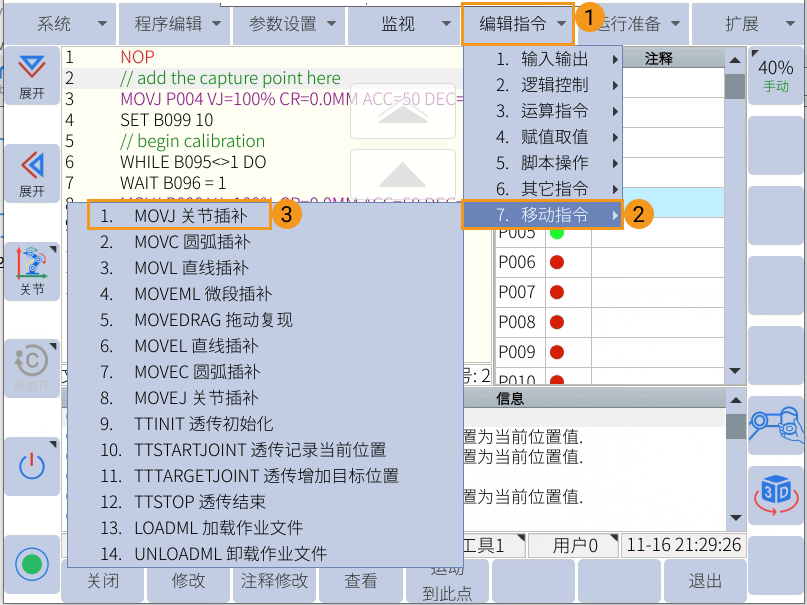
选中程序第 2 行,依次单击。
-
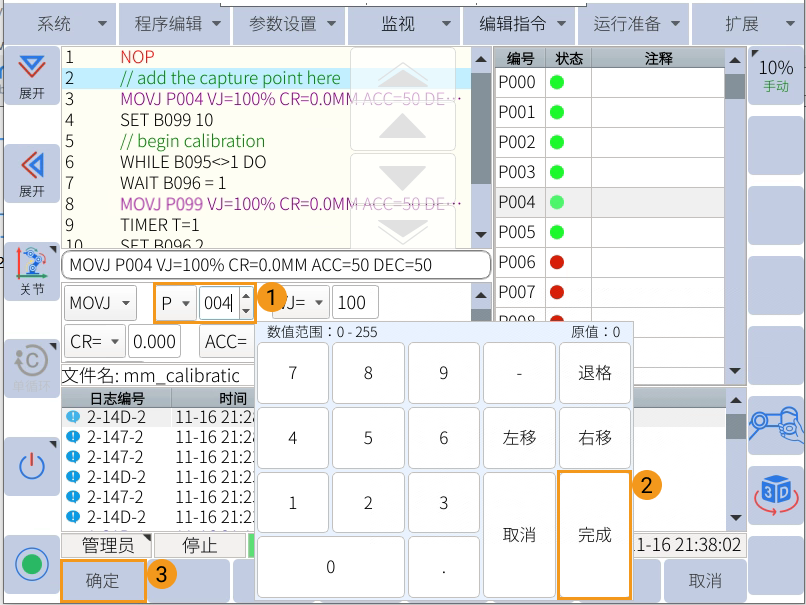
选择存有标定初始点的变量P,点击 完成。按下示教器背面的黄色伺服安全开关,单击 确认 插入移动指令。

-
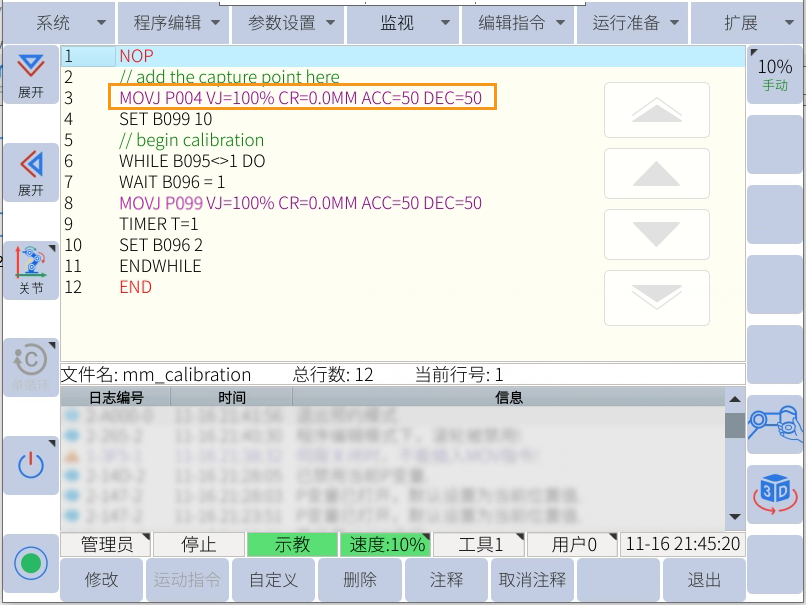
若成功添加 MOVJ 指令,您可看到如下图程序第3行所示的指令。
|
您可根据实际情况选择移动类型,即 MOVJ 或 MOVL。选用 MOVJ 关节插补时,应使用相应的 变量P 将标定点以关节角(JPs)形式保存;选用 MOVL 直线插补时,应使用相应的 变量V 将标定点以工具中心点(TCP)形式保存。 |
运行标定程序
-
将光标移动到程序首行,转动示教器上的钥匙至 PLAY 模式。
-
点击示教器右下角的黄色按钮激活伺服,再按下绿色按钮自动运行程序。

-
确认 Mech-Vision 日志栏的 Console 标签页中显示“进入标定流程,请在 Mech-Vision 中启动标定”。
在 Mech-Vision 中完成标定
-
启动 Mech-Vision 软件,单击 相机标定(标准) 或在菜单栏中依次单击打开标定工具。
-
根据相机的安装方式,按照软件提示完成剩余操作。
-
若相机安装方式为 Eye to Hand 模式,则参考《Eye to Hand 场景下的自动标定》。
-
若相机安装方式为 Eye in Hand 模式,则参考《Eye in Hand 场景下的自动标定》。
-
| 如果机器人在 60 秒内没有到达下一个标定点,Mech-Vision 软件会发出超时报错,此时需要重新选择标定程序, 并重新运行标定程序,然后在 Mech-Vision 软件中按照提示重新开始标定。 |