ABB 标准接口通信配置(RobotWare 6)
本节介绍如何配置 ABB 标准接口通信。
检查硬件和软件版本
-
四轴或六轴 ABB 机器人。
-
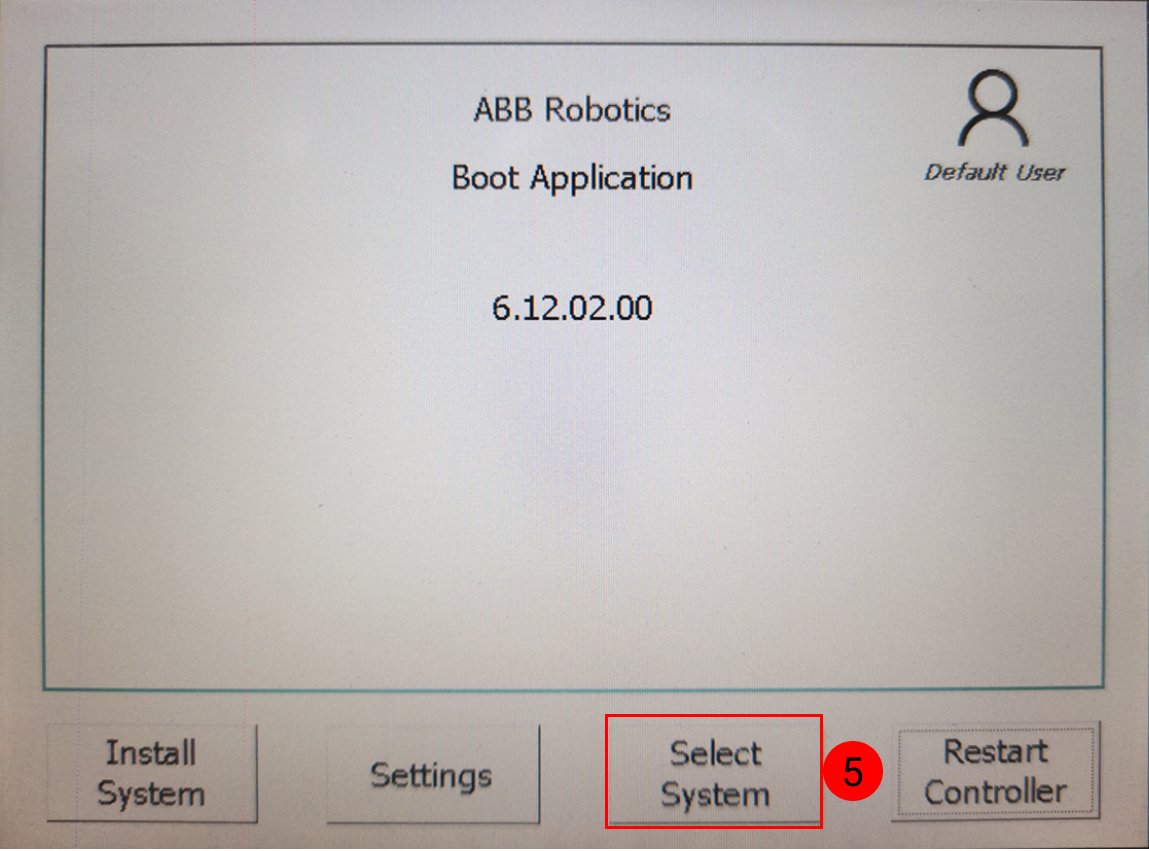
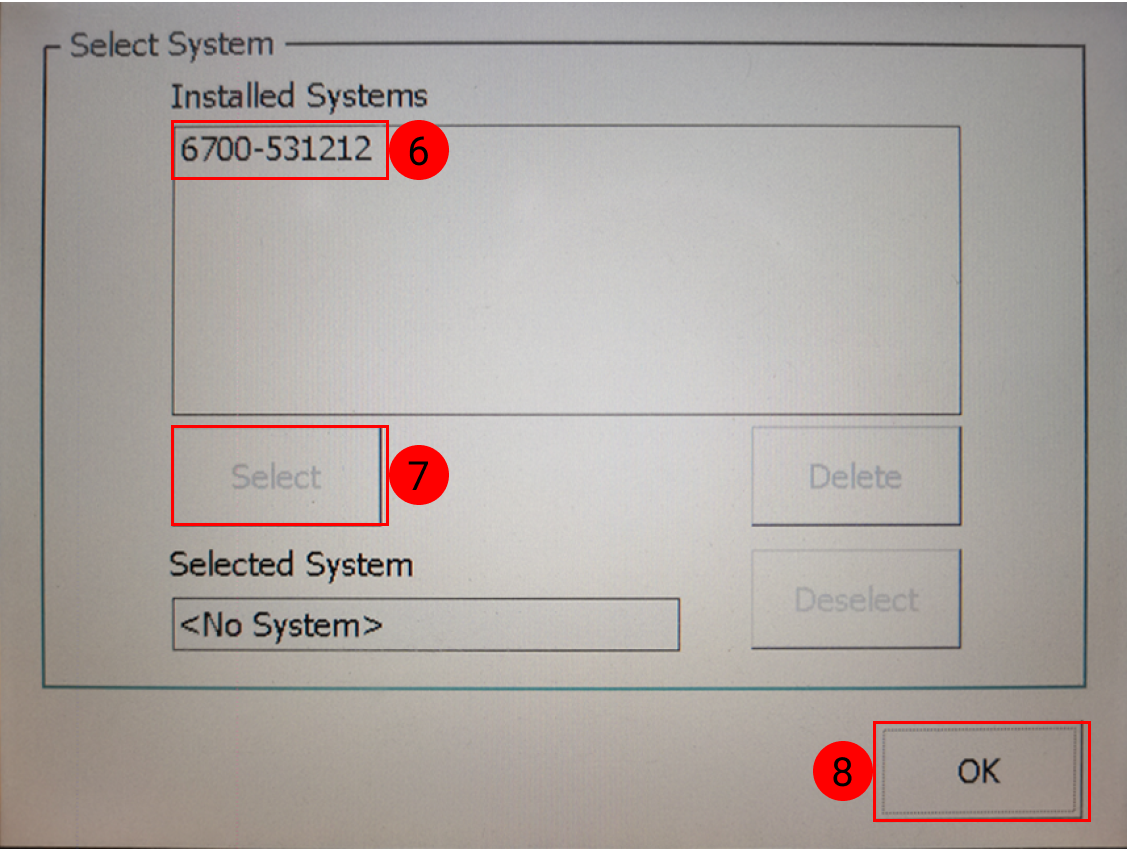
控制模块已安装 616-1 PC Interface 选项,检查方式如下:
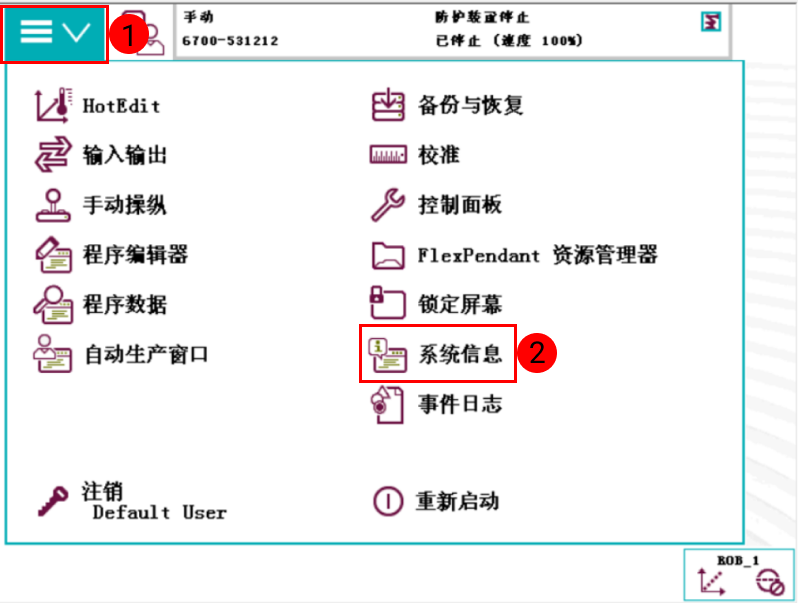
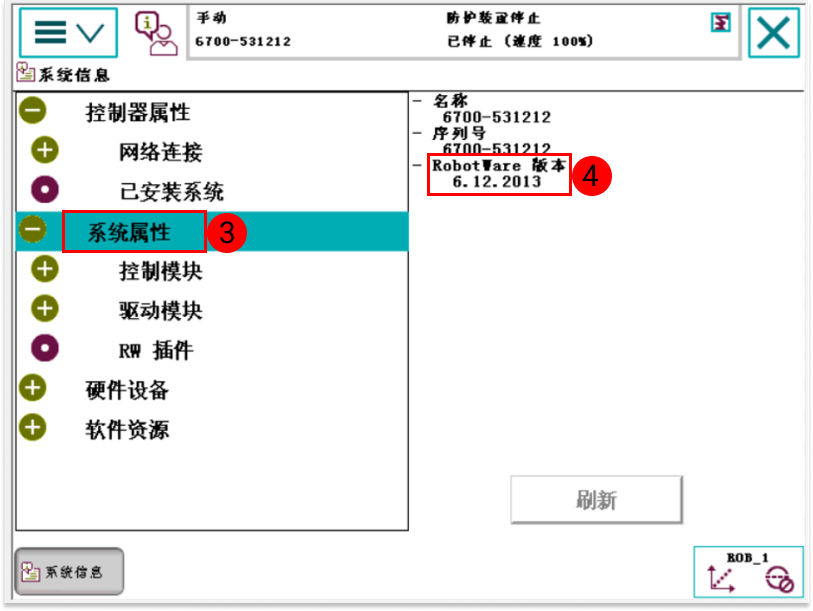
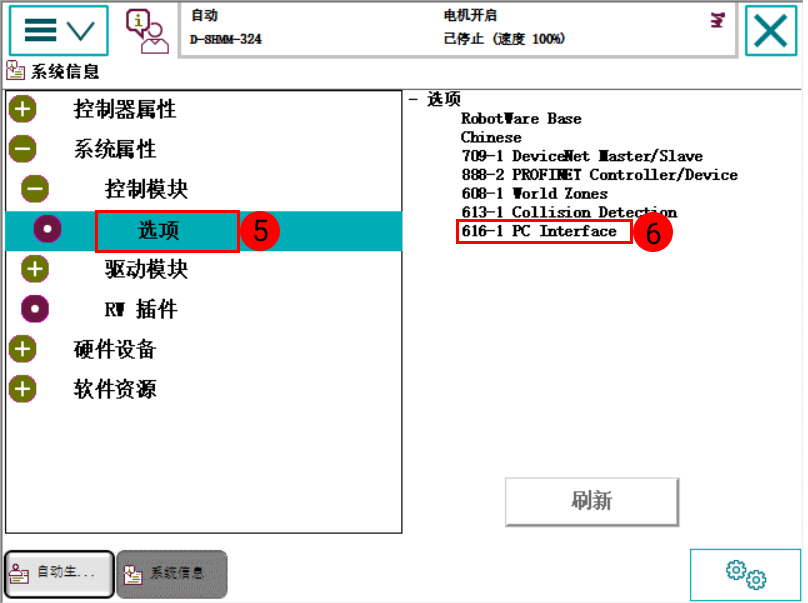
| 控制模块必须安装 616-1 PC Interface 选项才能使用标准接口通信。 |
设置 Mech-Vision 中“机器人与通信配置”
-
单击 Mech-Vision 工具栏中 机器人与接口配置 。
-
单击 选择机器人 下拉框,选择 品牌机器人 ,然后单击 选择机器人型号 ,选择具体 ABB 机器人型号,单击 下一步 。
-
在 通信方式 下,接口类型选择 标准接口 ,协议选择 TCP Server ,协议格式选择 HEX-Little endian ,最后单击 应用 。

-
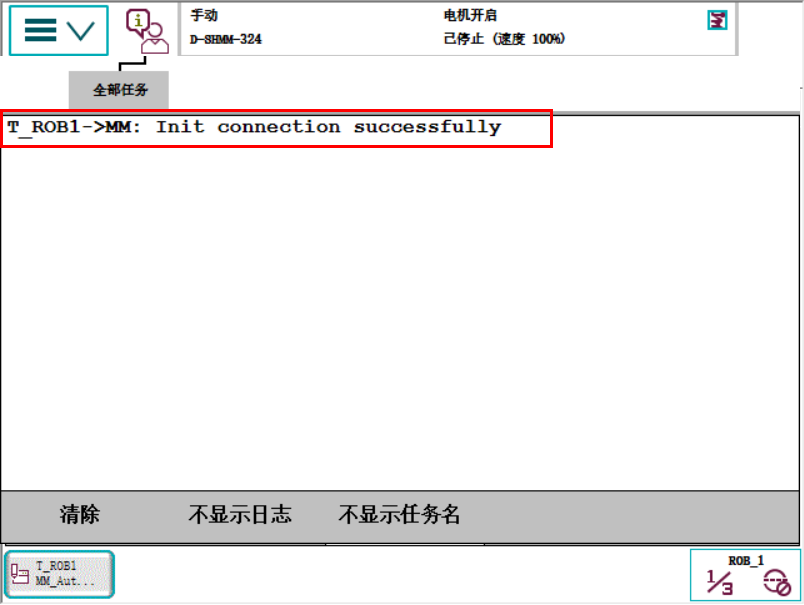
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

烧录文件至机器人中
注意事项
请在操作机器人前进行备份,以便在误操作后恢复机器人系统。
-
在示教器上创建备份
-
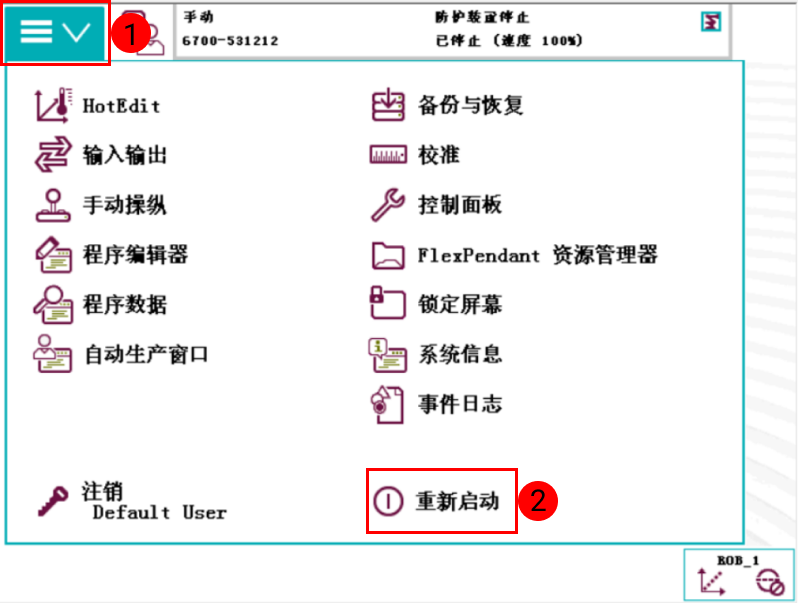
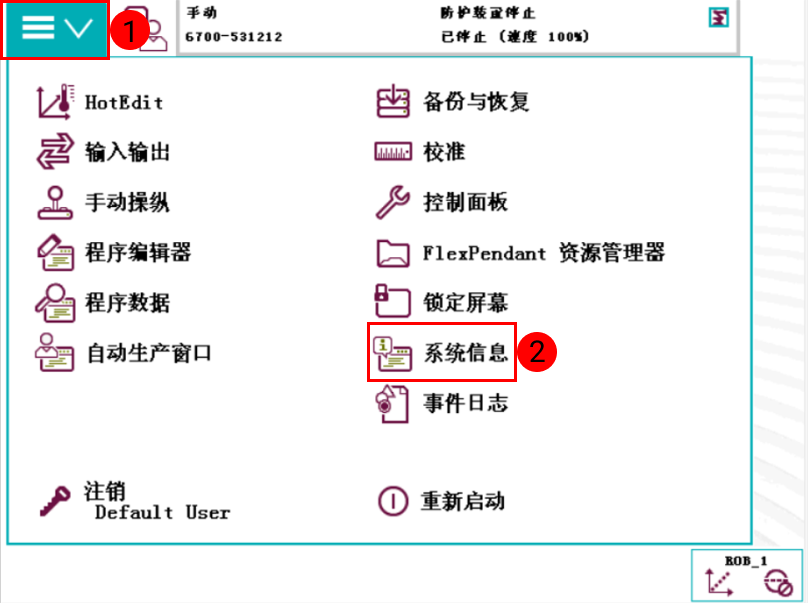
单击左上角菜单栏后显示主界面,然后单击 备份与恢复 。
-
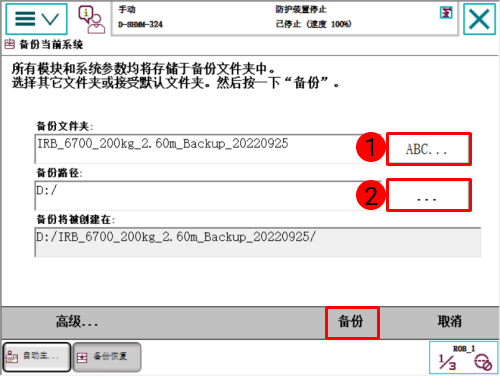
单击 备份当前系统… 。

-
单击 1 处可修改名称,单击 2 处可修改路径,完成修改后,单击 备份 。
-
准备待烧录文件
在梅卡曼德系统软件的安装目录 Mech-Center\Robot_Interface\ABB 文件夹下,将 ABB 机器人烧录文件(以下两个文件)复制到 U 盘中。
-
MM_Module.mod (程序模块文件)
-
MM_Auto_Calib.mod (程序模块文件)
烧录文件至机器人
烧录文件至机器人可在示教器或 RobotStudio 上完成。
-
从示教器导入:
-
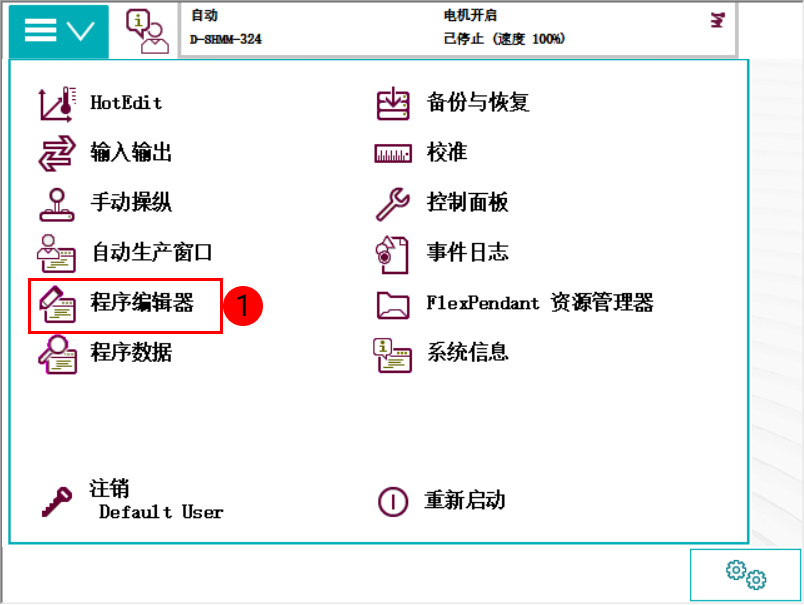
单击 程序编辑器 。
-
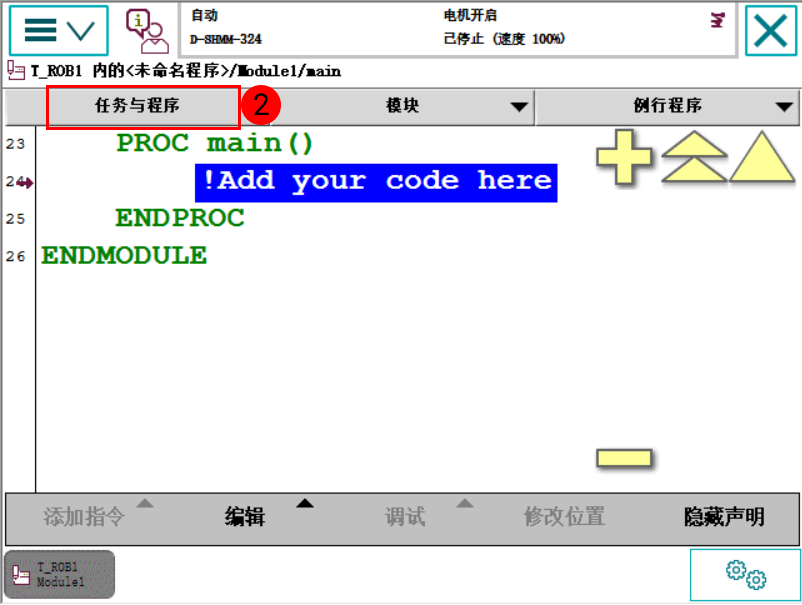
单击 任务与程序 。
-
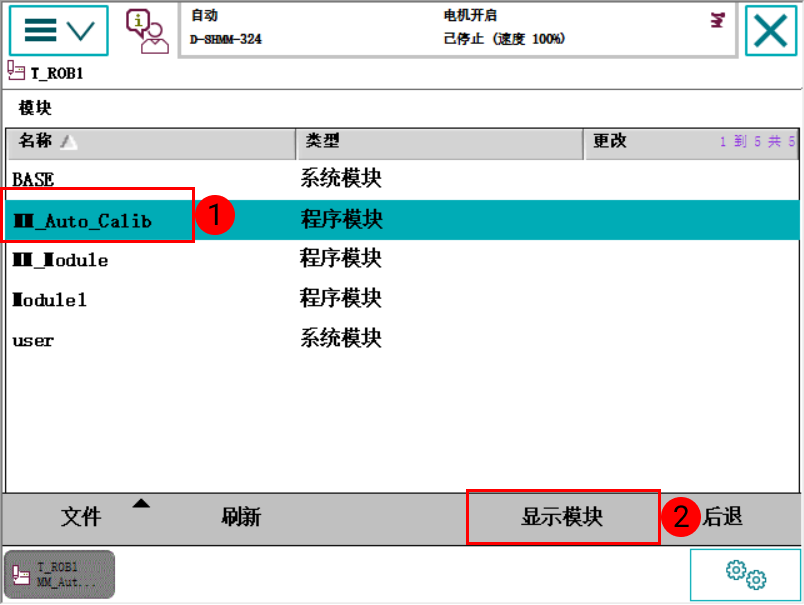
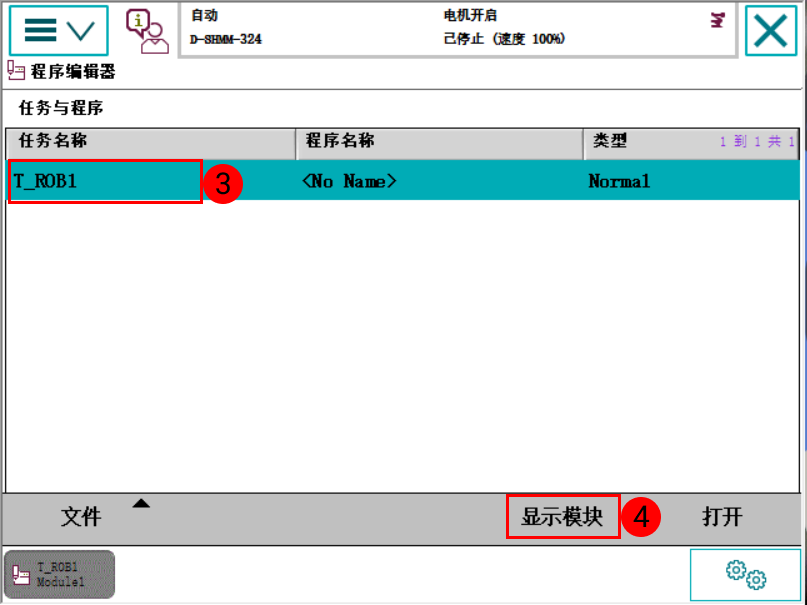
选中 T_ROB1 后单击 显示模块 。
-
依次单击。
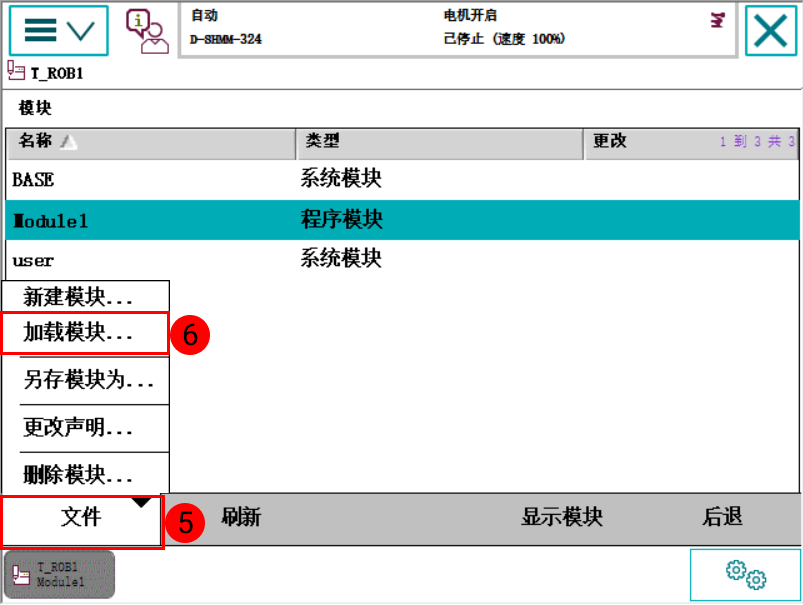
-
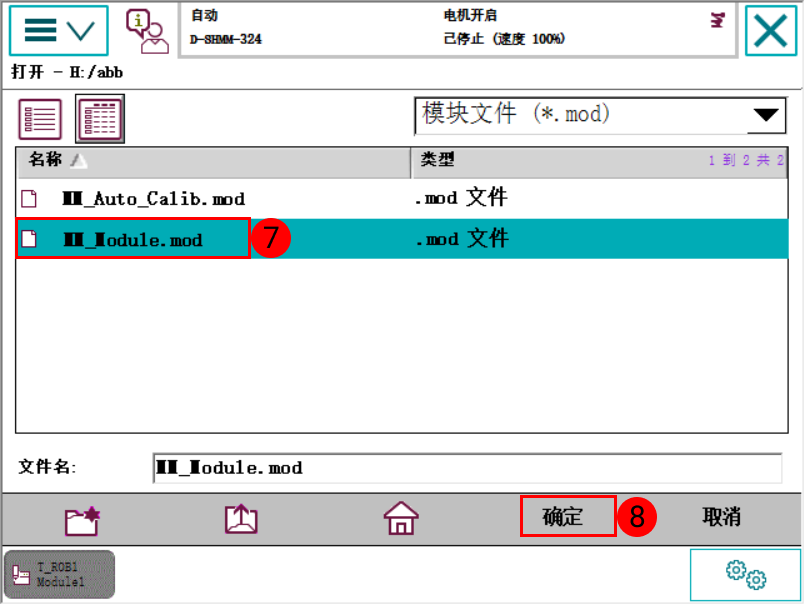
找到 U 盘中的程序模块文件,选中 MM_Module.mod 后单击 确定 。
-
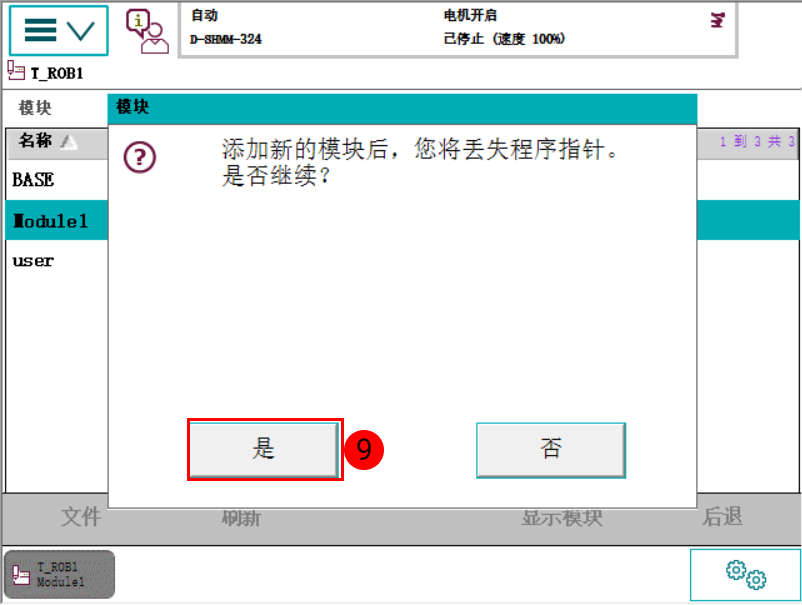
在弹出的窗口中单击 是 。
-
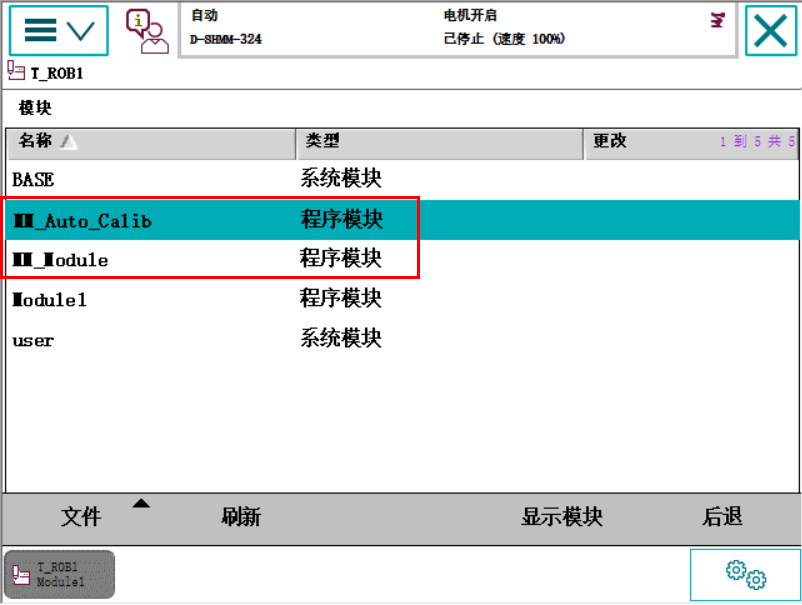
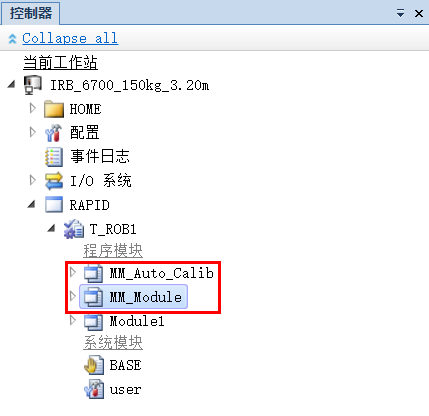
参考上述操作导入 MM_Auto_Calib.mod ,最后在 T_ROB1 下检查两个文件是否被成功导入。
-
-
从 RobotStudio 导入:
-
打开 RobotStudio,连接控制器。
-
如果工控机网线插在机器人控制器 LAN 口,单击 一键连接 。
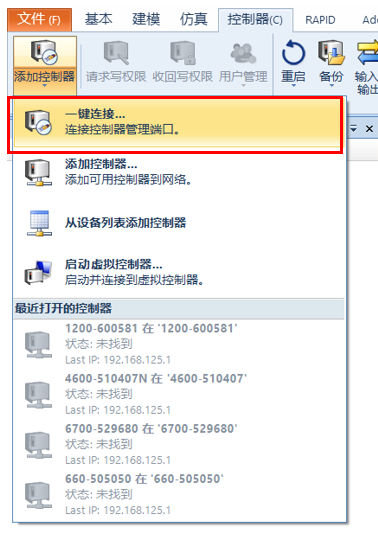
-
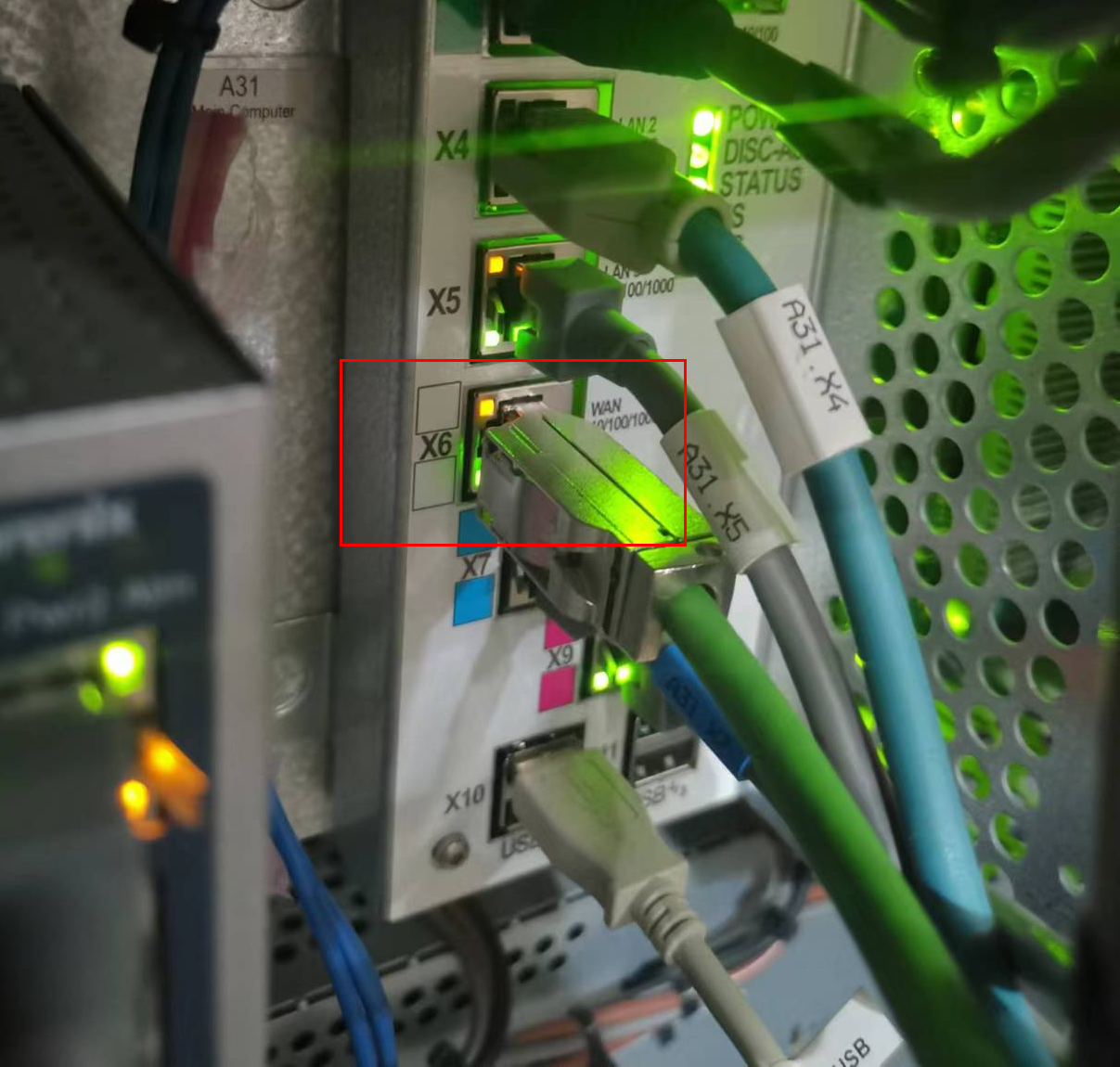
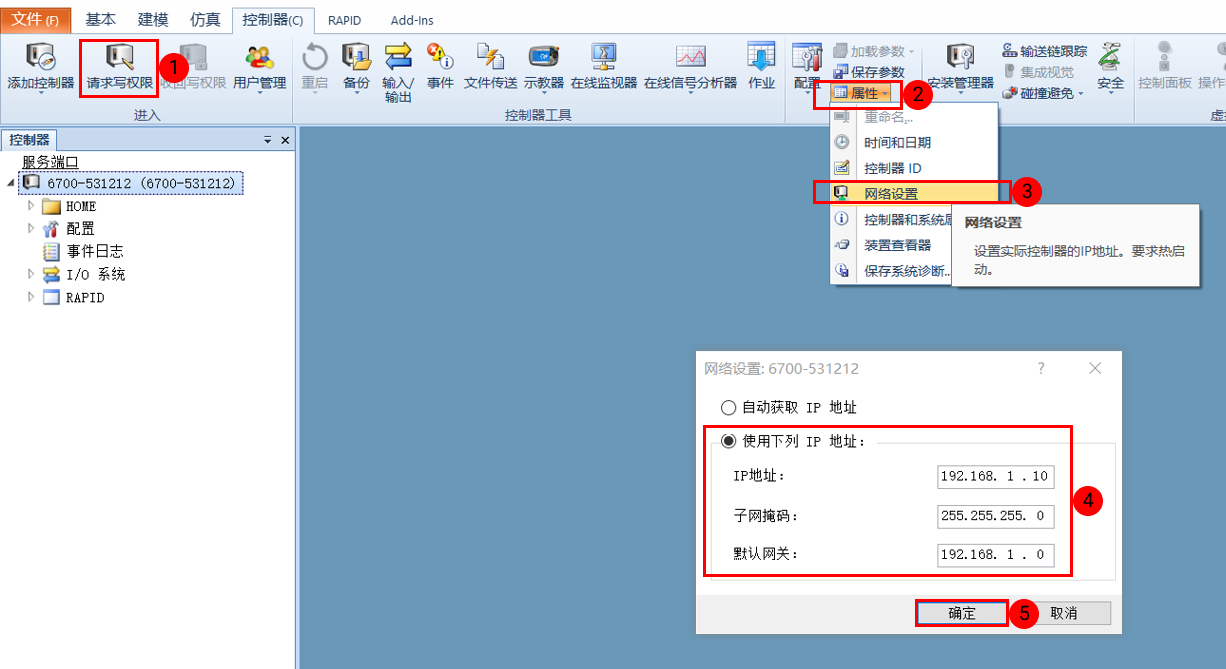
如果是通过交换机或者直接连接在机器人控制器 X6 网口(WAN口),按下图所示来添加控制器,控制器添加完成后,将自动连接到控制器管理端口。
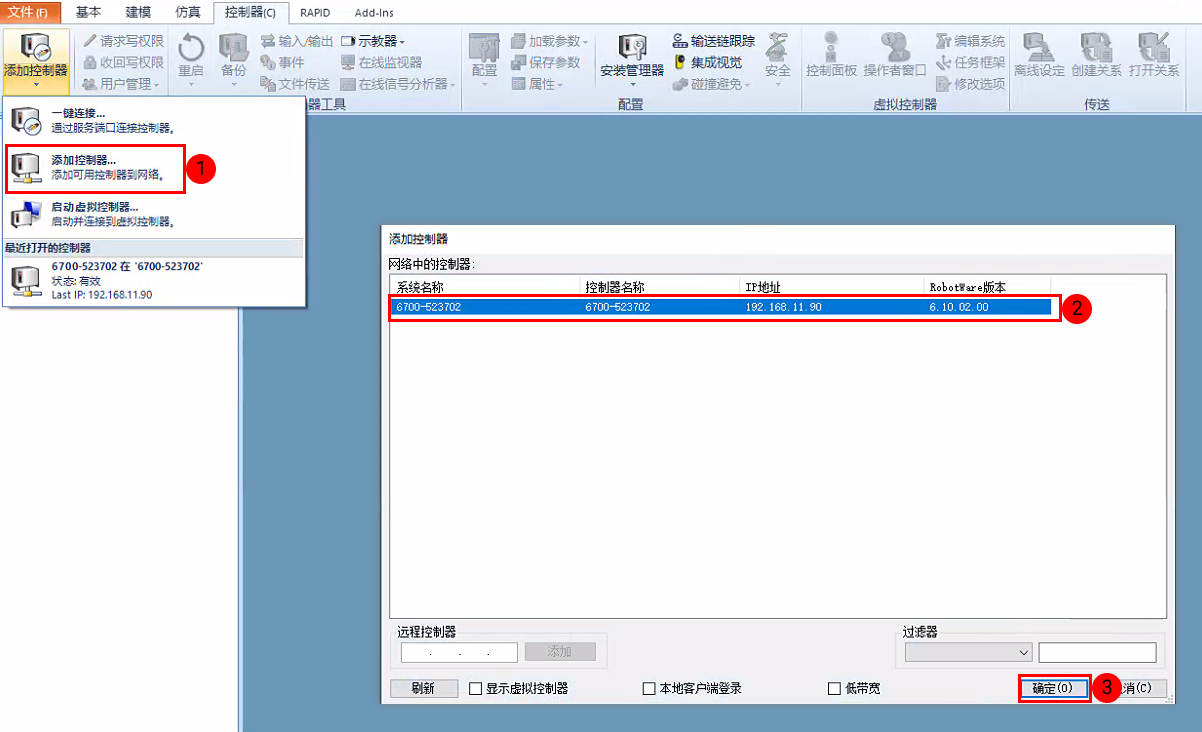
-
-
请求写权限。 单击 请求写权限 ,向示教器端请求写权限。

在示教器端的 请求写权限 窗口中,点击 同意 。
-
按下图所示找到并右键单击 T_ROB1 ,在弹出的菜单中单击 加载模块 。
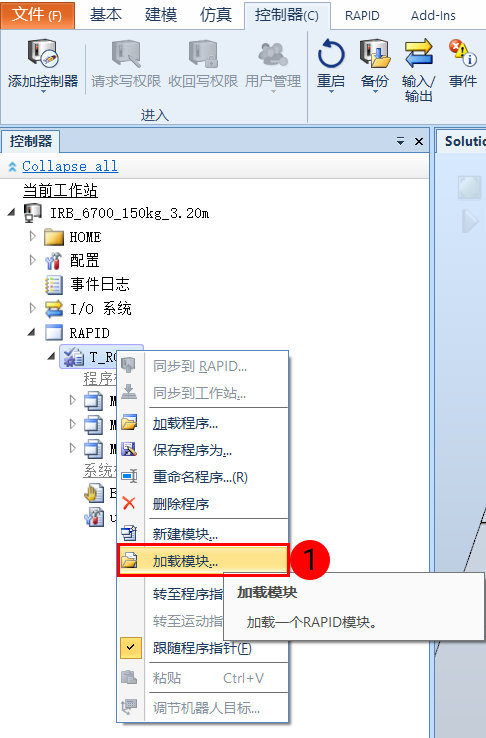
-
选中程序模块文件后,单击 打开 。
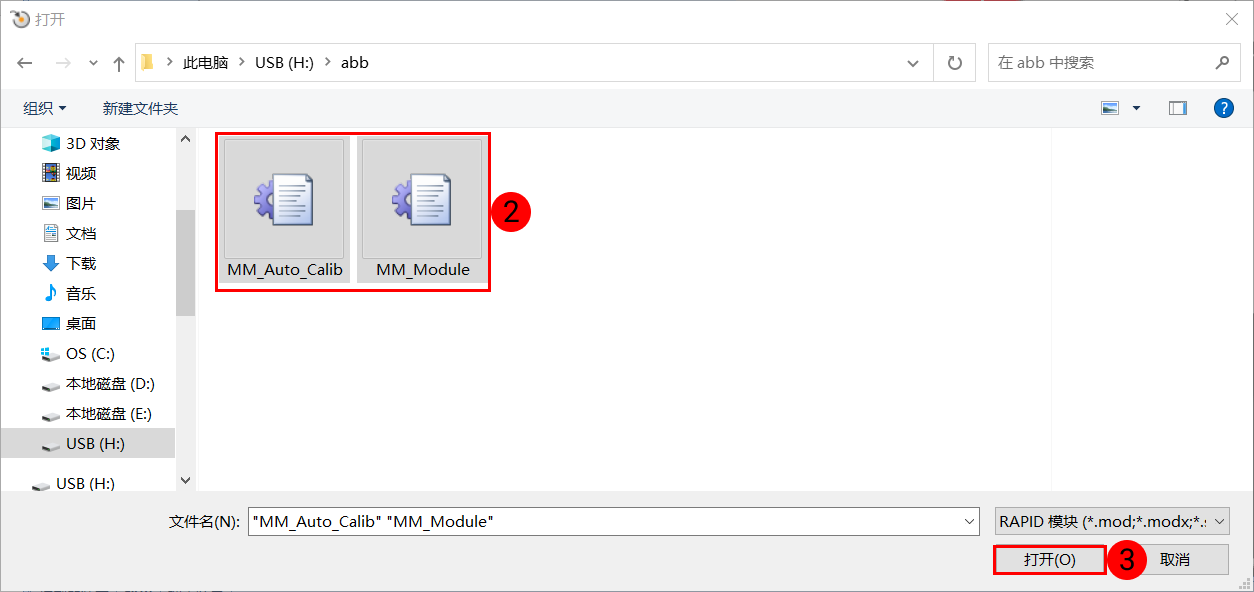
-
在 T_ROB1 下检查两个文件是否被导入。
-