YASKAWA (安川)标准接口通信配置
本节介绍如何配置 YASKAWA 标准接口通信。
检查硬件及软件版本
-
确认使用的是六轴 YASKAWA 机器人。
-
确认机器人控制器型号与机器人系统版本符合下表中的要求。
机器人控制器型号 机器人系统版本 YRC1000
YAS2.94.00-00
YRC1000micro
YBS2.31.00-00
本文以YRC1000(YAS2.94.00-00)机器人为例。 -
检查 YASKAWA 机器人是否已开启以太网和 MotoPlus 功能。
建立网络连接
硬件连接
对于 YRC1000 系列控制柜,请将工控机网线的另一端连接到机器人控制器 CPU 基板的 LAN2(CN106)网口上。
|
对于 YRC1000 系列的控制柜:
|
设置 IP
-
按住
主菜单键的同时启动机器人,进入维护模式。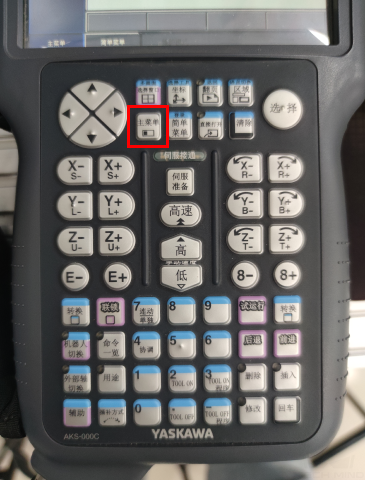
-
启动机器人时若不按住
主菜单键,则会进入正常模式。 -
如机器人已经启动,请重启机器人,重启的同时按住
主菜单键。
-
-
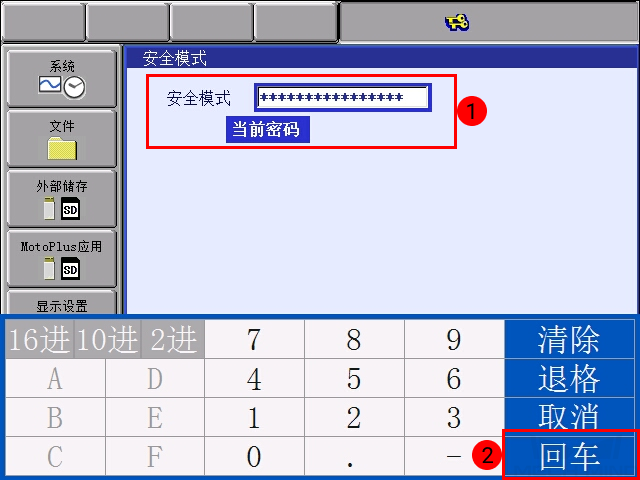
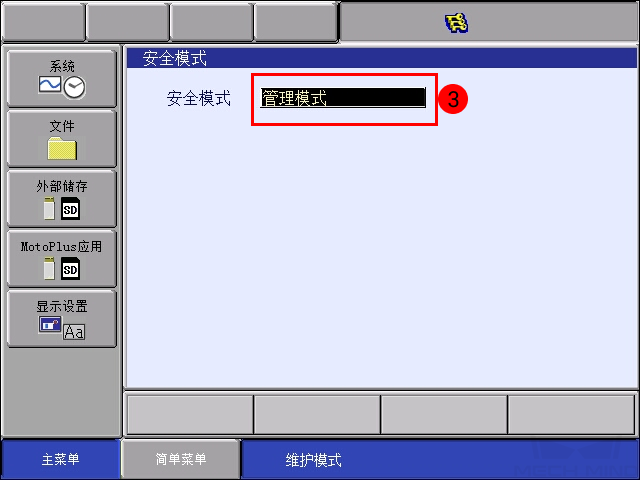
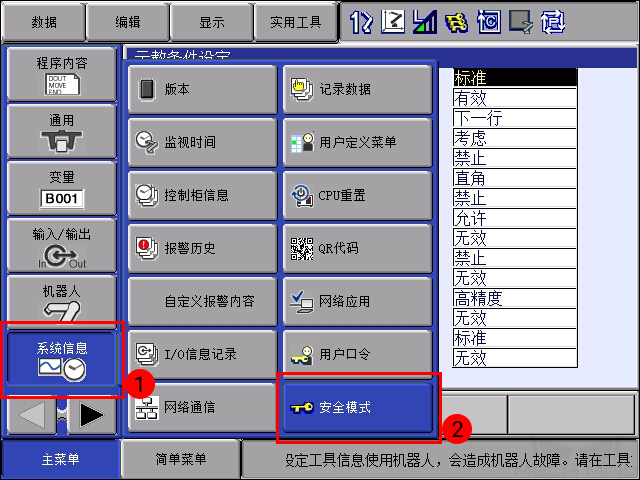
单击,选择 管理模式 。


-
输入密码(默认密码为16个“9”),单击 回车 键进入 管理模式 。
-
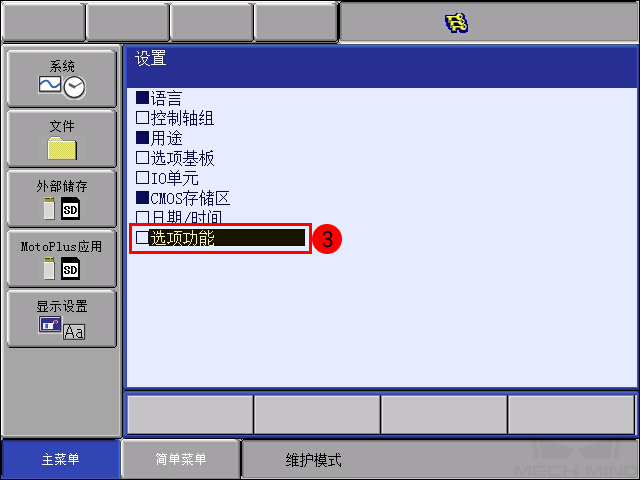
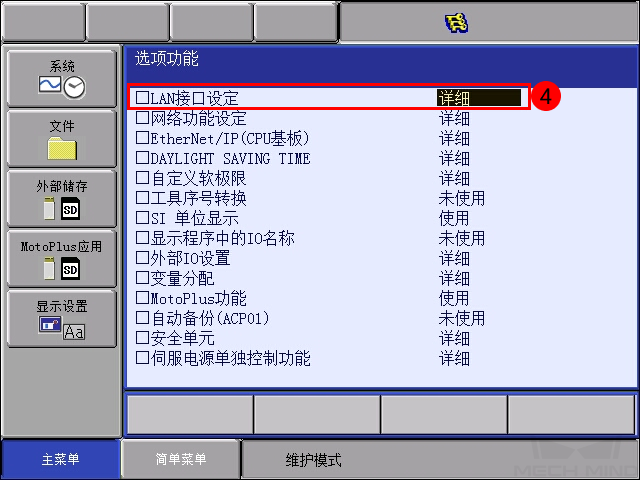
单击,进入选项功能界面后,选择 LAN 接口设定 , 进入 LAN 接口设定界面。

-
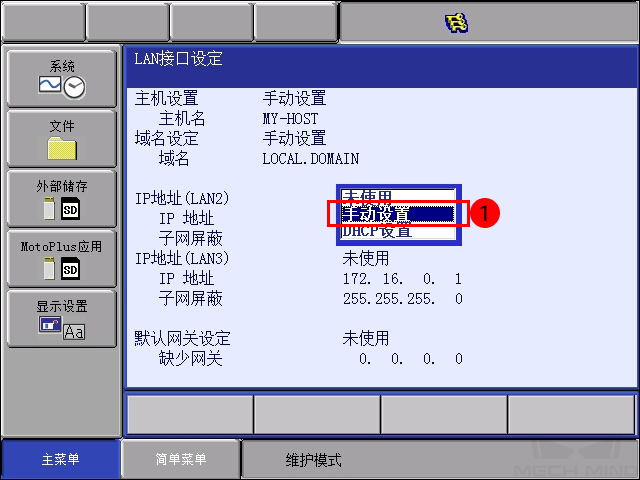
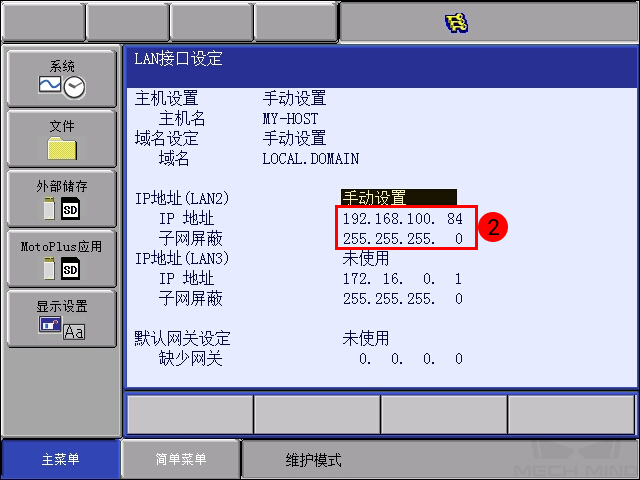
LAN2 的 IP 地址,需在 LAN2 端口处进行设定,请在下拉菜单中选择 手动设置 ,并务必设定正确的 IP 地址 和 子网屏蔽 (子网掩码) 。
-
LAN2 端口 IP 地址需与工控机 IP 地址位于同一网段下。
-
子网屏蔽设置为 255.255.255.0 。
-
-
修改 IP 地址后,按示教器右下角
ENTER键,会有弹窗提示 修改吗? ,选择 是 。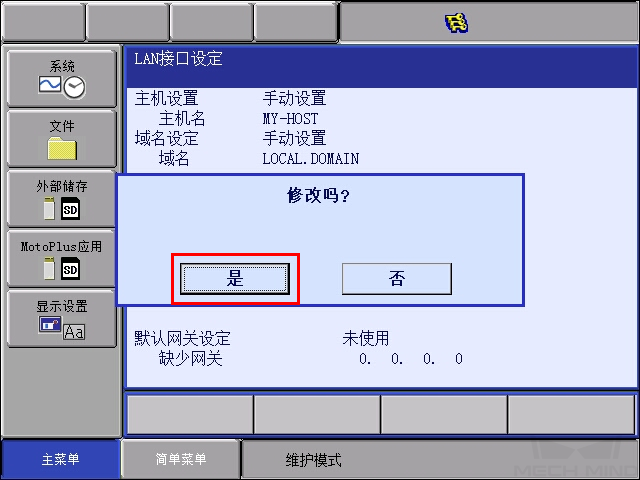
设置 Mech-Vision 中“机器人与通信配置”
-
单击 Mech-Vision 工具栏中 机器人与接口配置 。
-
单击 选择机器人 下拉框,选择 品牌机器人 ,然后单击 选择机器人型号 ,选择具体 YASKAWA 机器人型号,单击 下一步 。
-
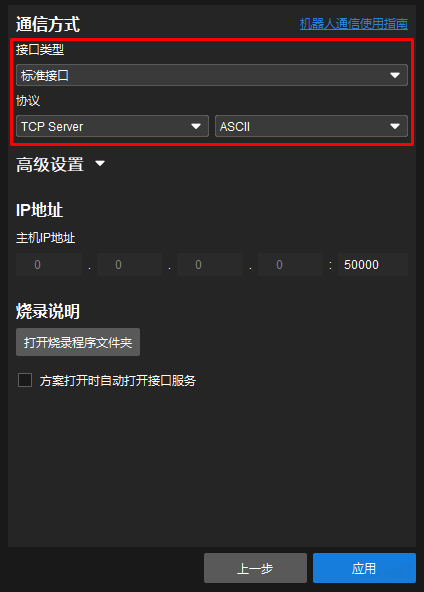
在 通信方式 下,接口类型选择 标准接口 ,协议选择 TCP Server ,协议格式选择 ASCII ,最后单击 应用 。
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

烧录文件至机器人中
| 烧录机器人程序前,如需备份前台程序,请参考 YASKAWA 机器人《操作要领书-共通篇》第7章。 |
选择待烧录的文件
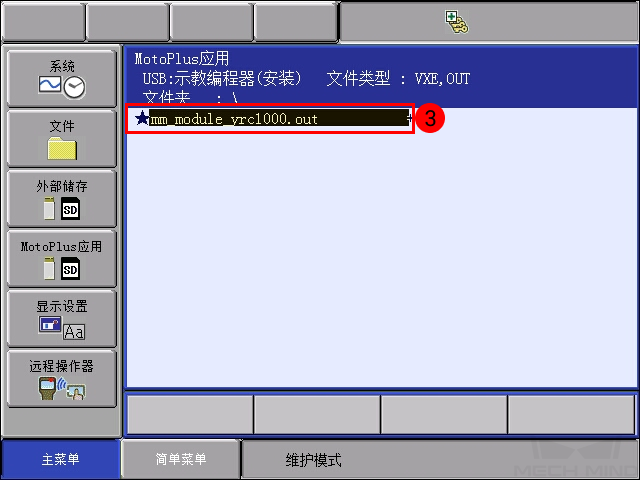
本文以 YRC1000 机器人进行操作说明。在梅卡曼德系统软件的安装目录 Mech-Center\Robot_Interface\YASKAWA 文件夹下,将 JBI 文件夹和 mm_module_yrc1000.out 文件复制至 格式化之后的空U盘根目录 下,其中 JBI 文件夹为前台程序文件夹,mm_module_yrc1000.out 文件为后台程序。
|



烧录前台文件至机器人中
-
当完成后台程序烧录后,重启机器人电源,在示教器主菜单依次单击,在下拉栏选择 管理模式 ,输入默认密码 16 个“9” 。


输入密码后,按下示教器屏幕右下角
回车键,进入 管理模式 。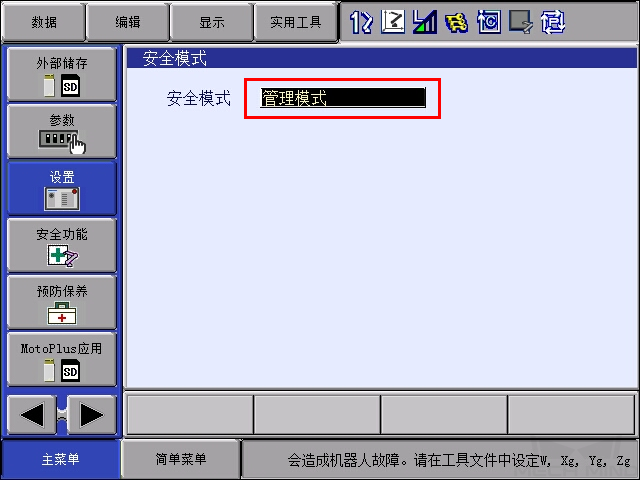
-
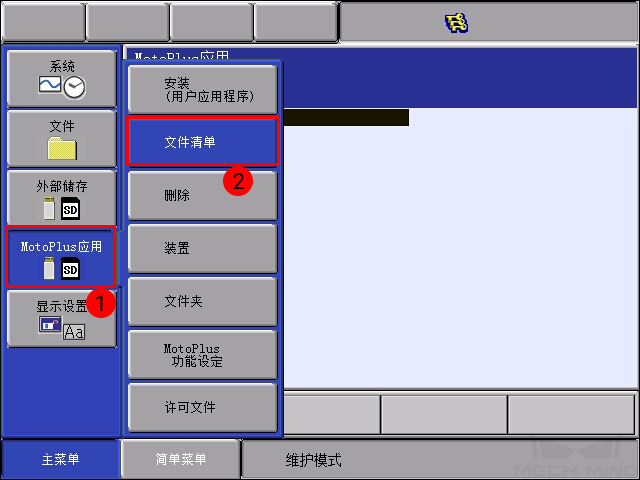
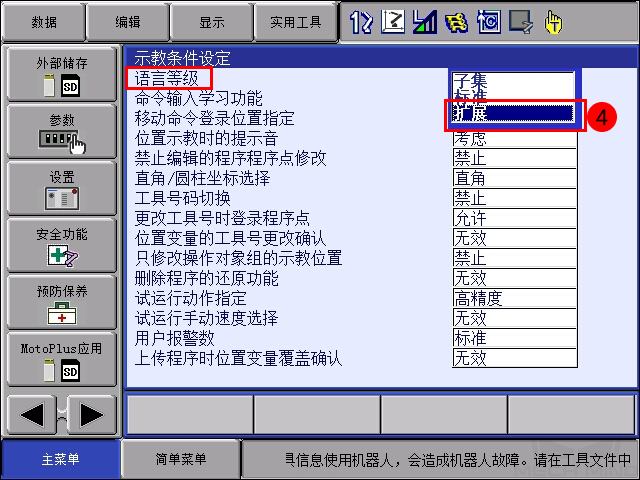
触屏单击左下角 翻页按钮
 ,然后在示教器屏幕依次单击,在语言等级下拉菜单中选择 扩展 。
,然后在示教器屏幕依次单击,在语言等级下拉菜单中选择 扩展 。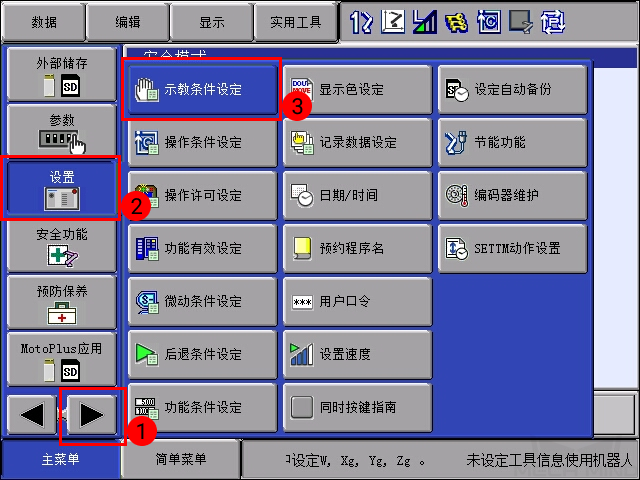
-
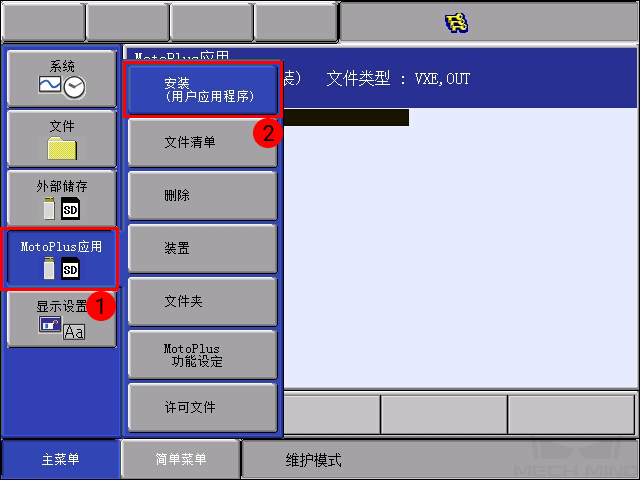
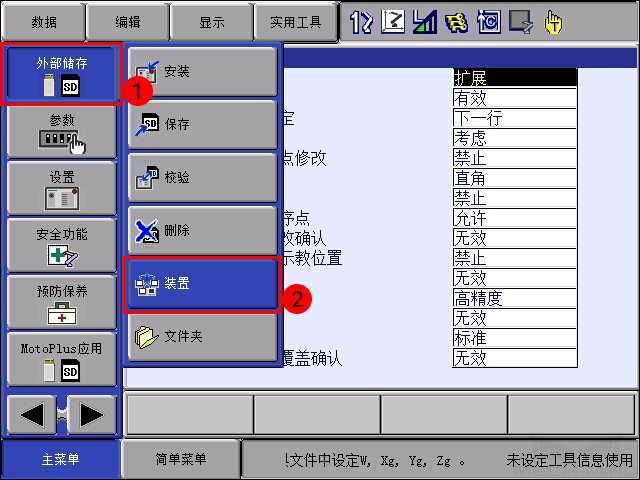
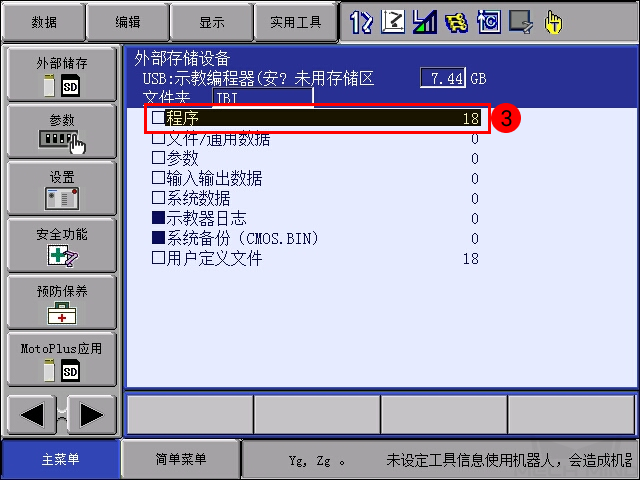
依次单击,选择 USB:示教编程器 ;

-
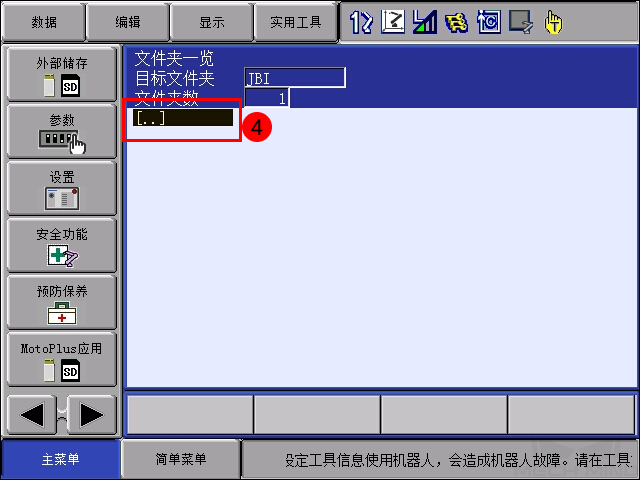
依次单击。显示文件夹列表后,选中并进入 JBI 文件夹。


-
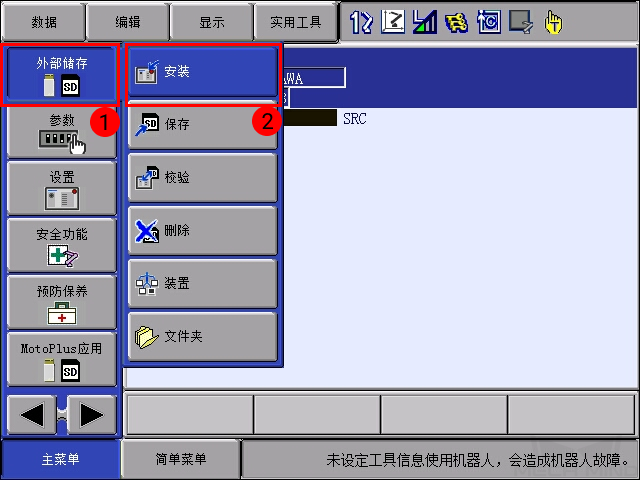
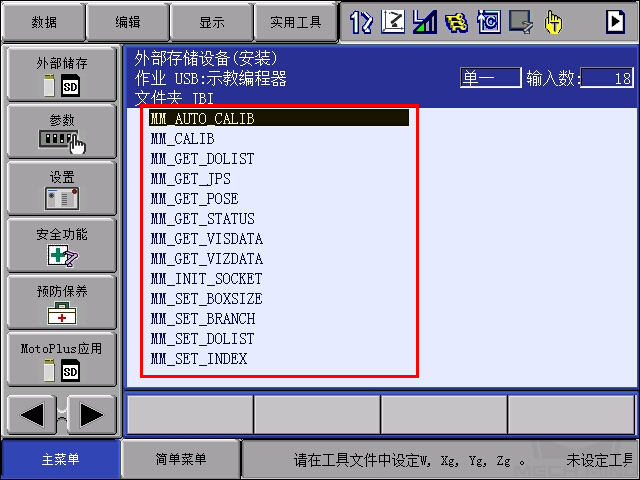
随后依次单击示教器屏幕,选择 程序 , 屏幕将显示待安装程序列表。
-
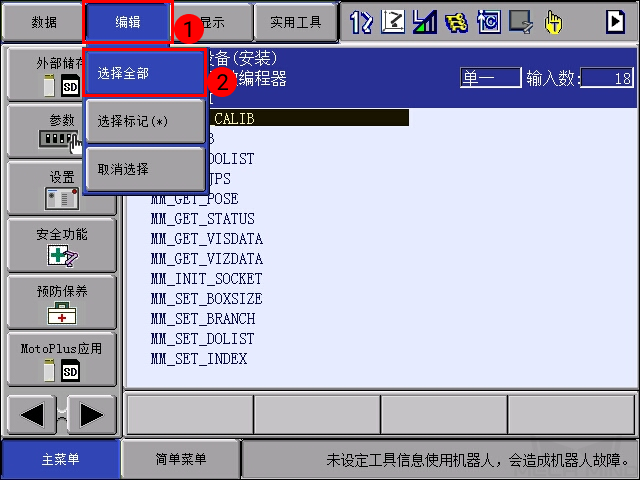
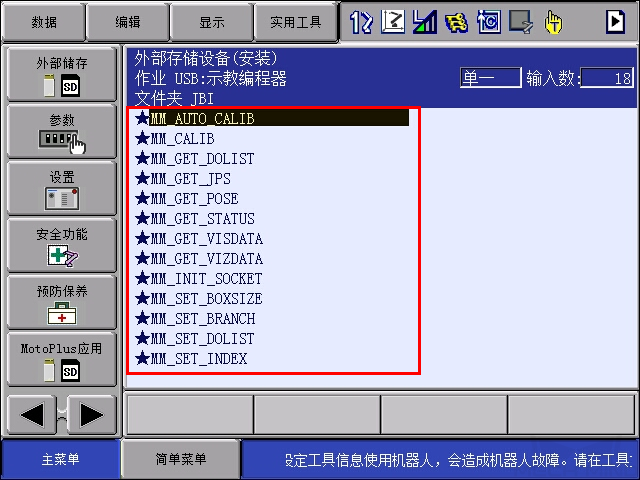
在待安装程序列表界面依次单击,选中所有程序。
-
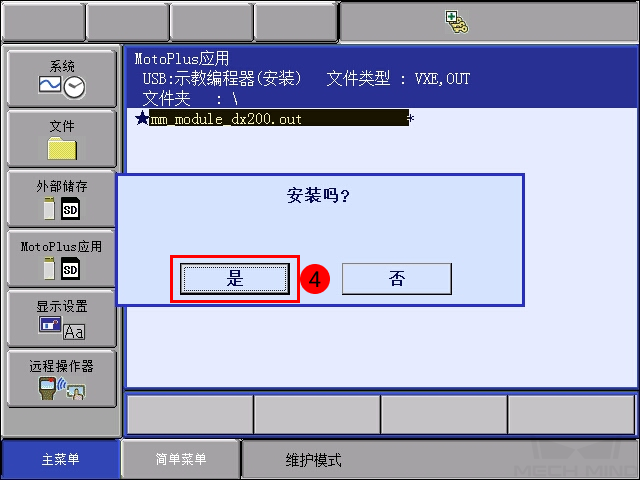
按下示教器右下角
回车键,在示教器屏幕弹窗中,选择 是 ,即完成前台程序安装。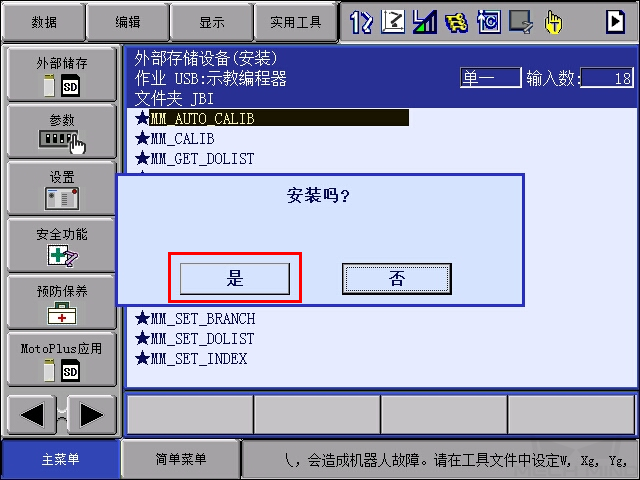
-
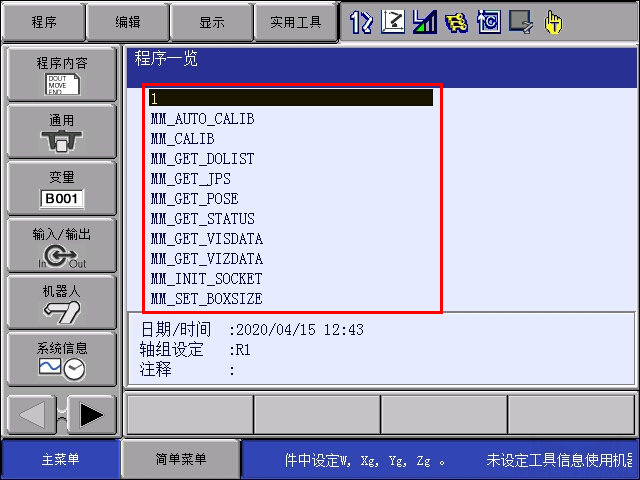
单击示教器屏幕,即可看到已安装程序列表。
测试机器人连接状态
测试连接
-
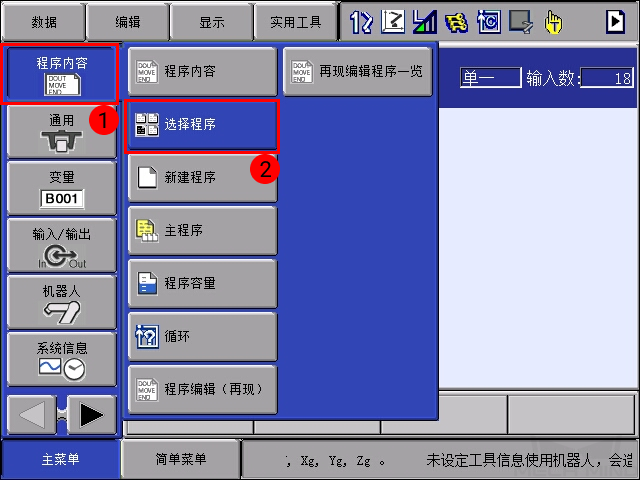
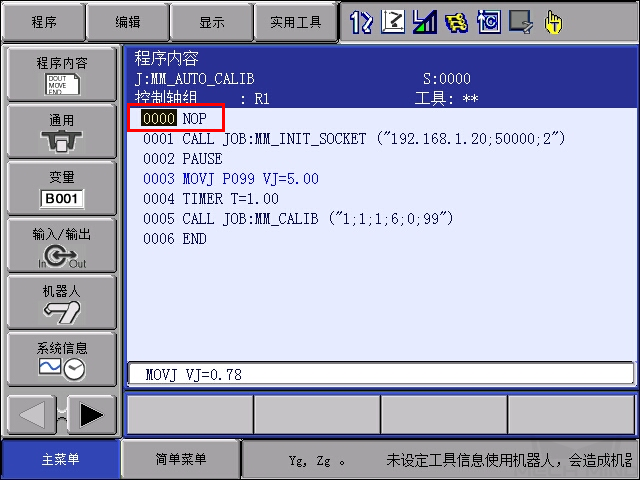
依次单击示教器屏幕,进入已安装程序列表界面。
-
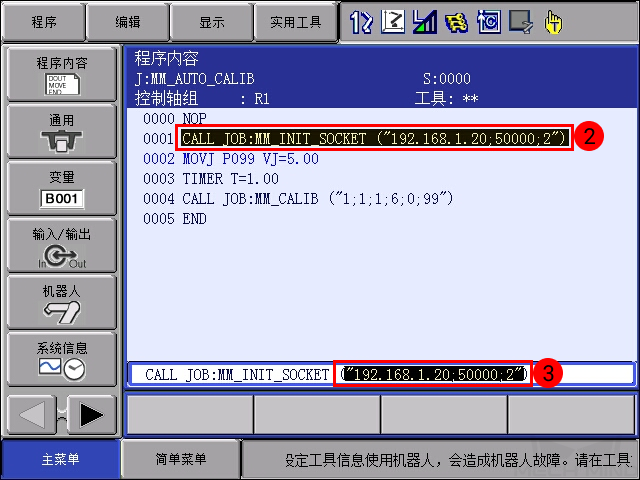
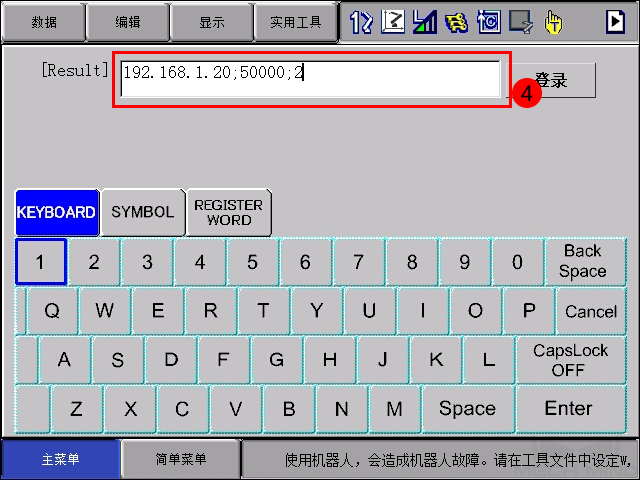
选中 MM_AUTO_CALIB 程序并按
选择键打开,选中 0001 行内容,并在右下方出现的内容中选中 IP 地址和端口号,按下选择键进入 IP 地址更改界面,将 IP 地址改为工控机 IP 地址和端口号。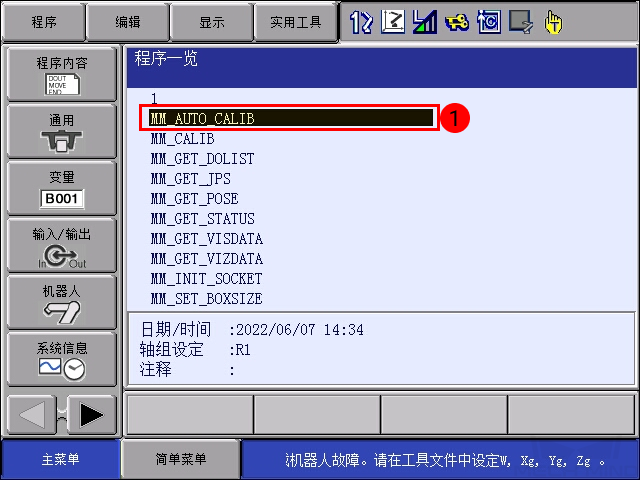
-
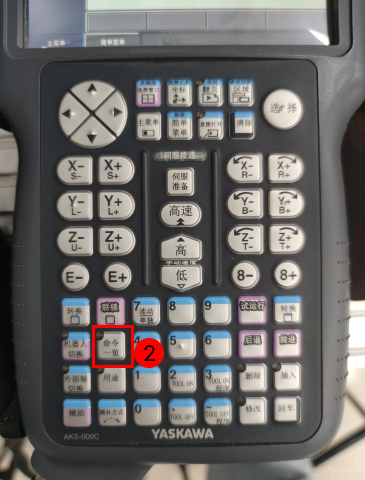
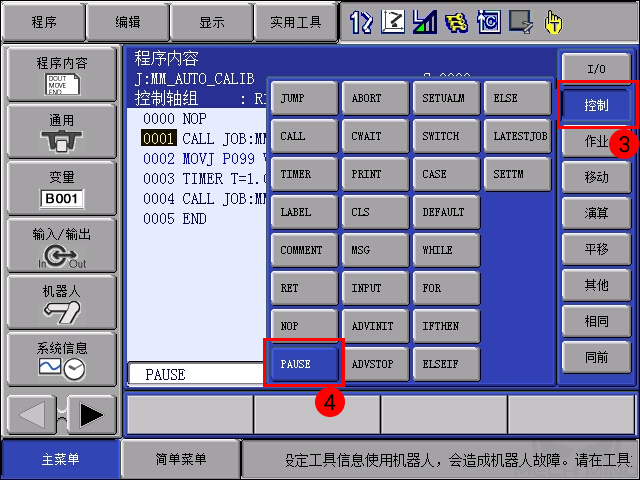
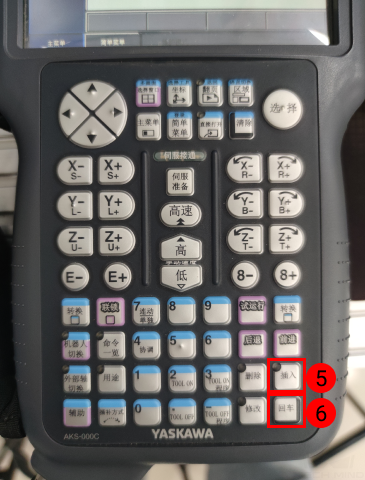
使光标位于 0001 行处,按下示教器上
命令一览键,在右侧菜单中依次选择,然后在示教器上依次按下键,此时会在第一行后插入 PAUSE 指令。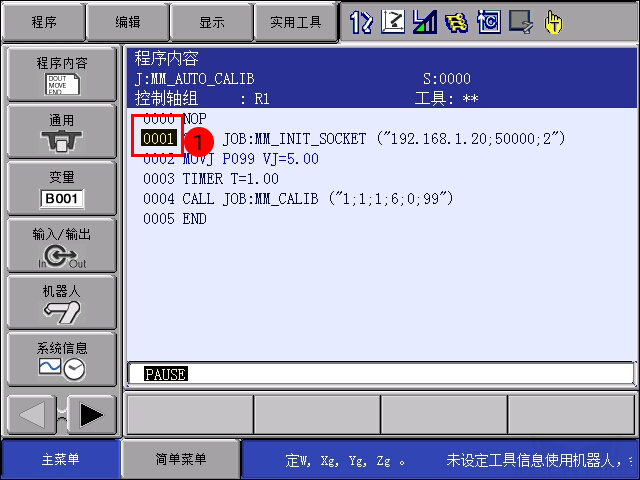
-
在示教模式下,按下示教器
伺服准备键后,手握示教器后方伺服使能开关,然后将示教器屏幕上黑色光标移至程序首行。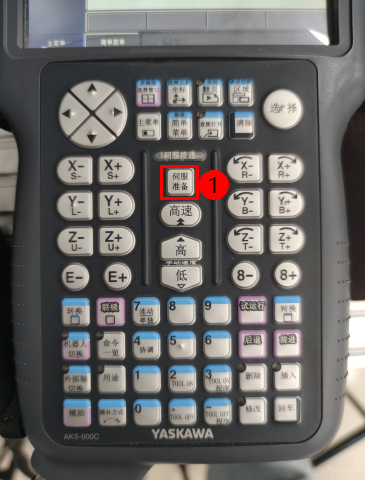

本步骤目的是确保程序从首行开始执行。
-
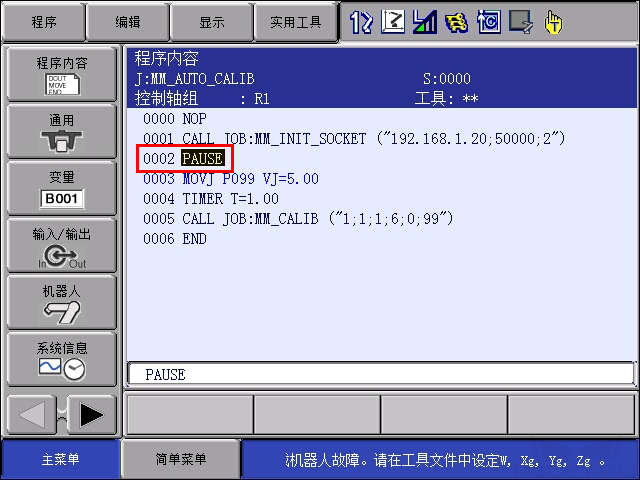
随后同时按下示教器
联锁与试运行键,黑色光标将自动停止在 PAUSE (暂停) 指令所在的第二行。
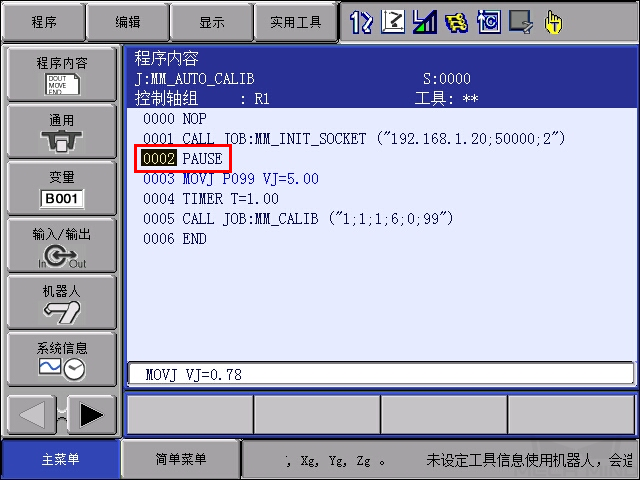
本步骤目的是通过试运行,判断通信是否正常。如通信正常,程序会自动停止在 PAUSE 指令处。
-
若连接成功,则 Mech-Vision 日志窗口的 Console 标签页下会出现相关提示。此时请务必删除 PAUSE 指令,否则影响机器人标定。
