Kawasaki标准接口通信配置
本节介绍如何将机器人标准接口程序烧录到Kawasaki机器人,并完成梅卡曼德视觉系统与机器人的标准接口通信配置。
| 标准接口程序烧录是将机器人标准接口程序及配置文件导入到机器人系统中,从而建立视觉系统与机器人的标准接口通信。 |
烧录前准备



设置“机器人通信配置”
-
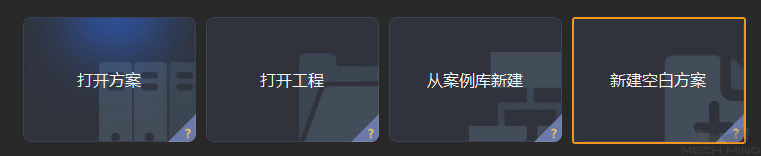
打开Mech-Vision软件。根据出现的界面不同,选择如下相应方法创建方案。
-
若出现欢迎界面,单击新建空白方案,即可新建空白方案。
-
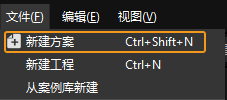
若出现主界面,依次单击菜单栏中,即可新建空白方案。
-
-
单击 Mech-Vision 工具栏中 机器人通信配置 。
-
在 机器人通信配置 窗口,进行如下配置。
-
单击 选择机器人 下拉框,选择 品牌机器人,然后单击 选择机器人型号,选择具体机器人型号,单击 下一步。
-
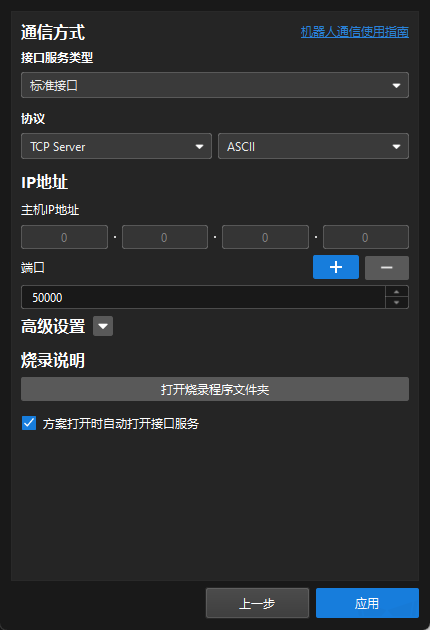
在 通信方式 下,接口服务类型 选择 标准接口 ,协议 选择 TCP Server,协议格式 选择 ASCII。
-
端口号建议设置为50000或50000以上。确保设置的端口号未被其他程序占用。
-
(可选)建议勾选 方案打开时自动打开接口服务。
-
单击 应用。
-
-
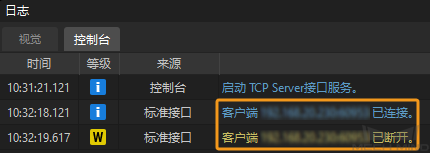
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。




烧录文件至机器人中
-
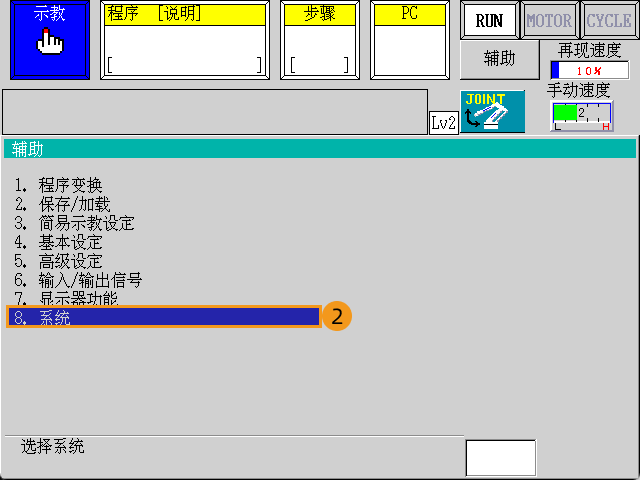
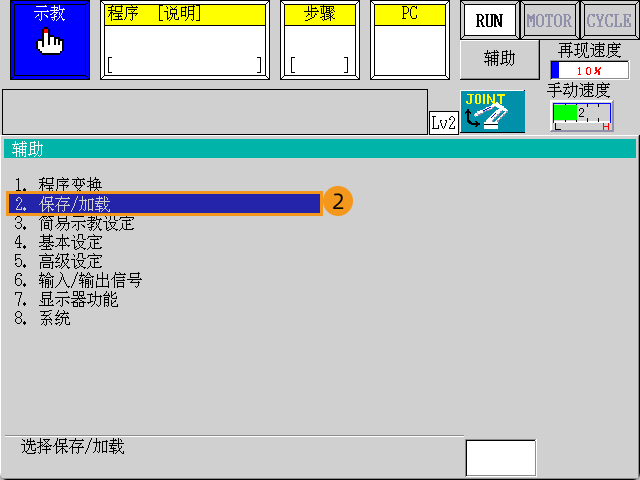
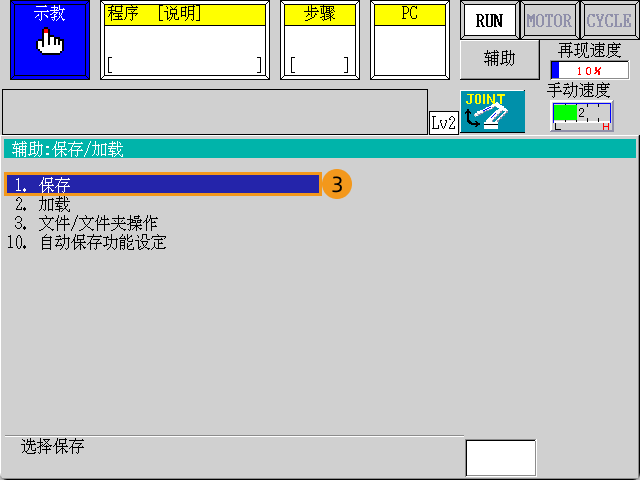
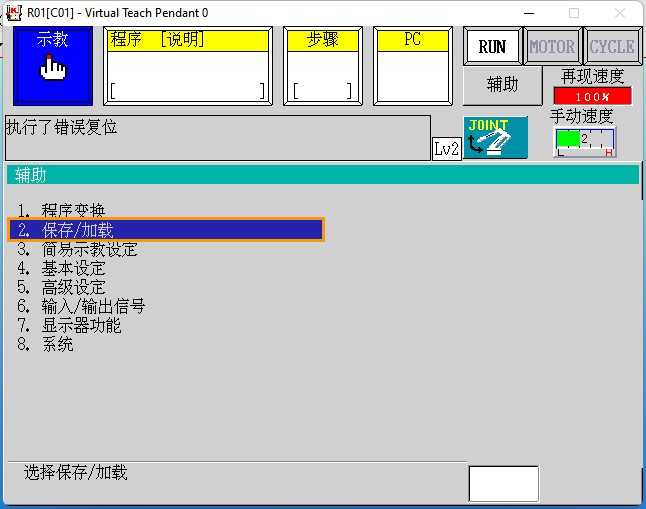
在示教器上,点击辅助按钮。

-
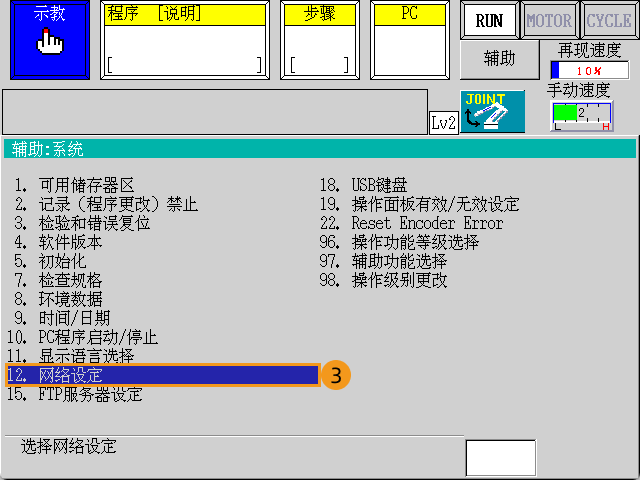
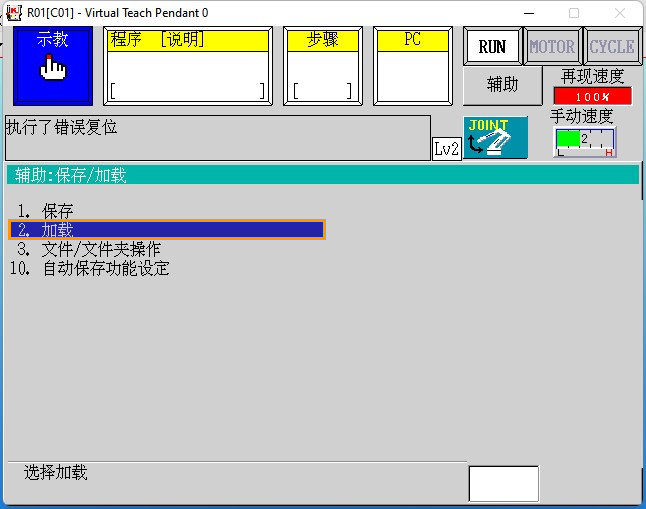
依次点击。
-
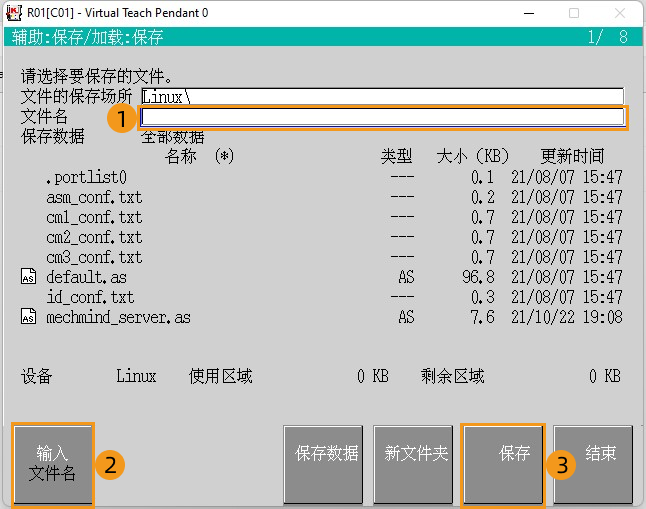
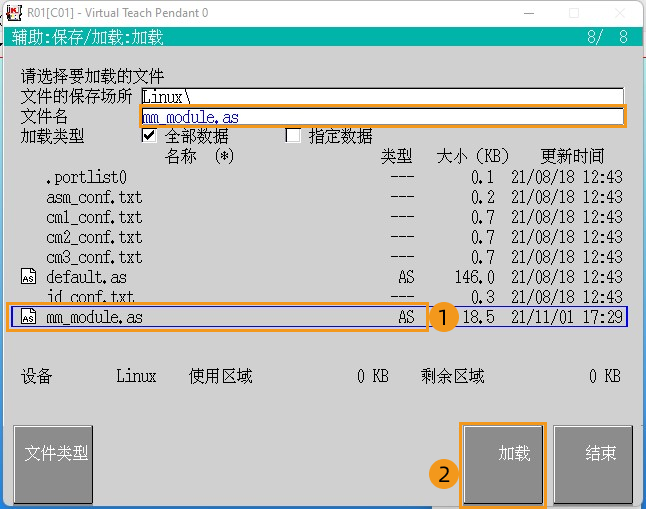
双击程序文件mm_module.as,使文件名处显示mm_module.as,然后点击加载。
-
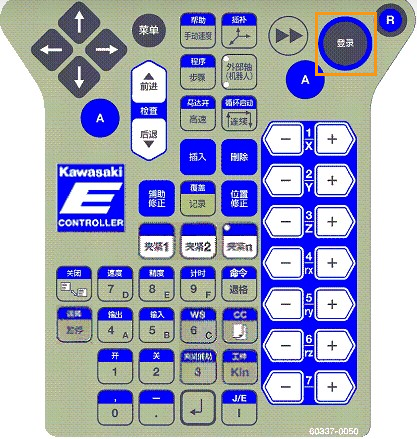
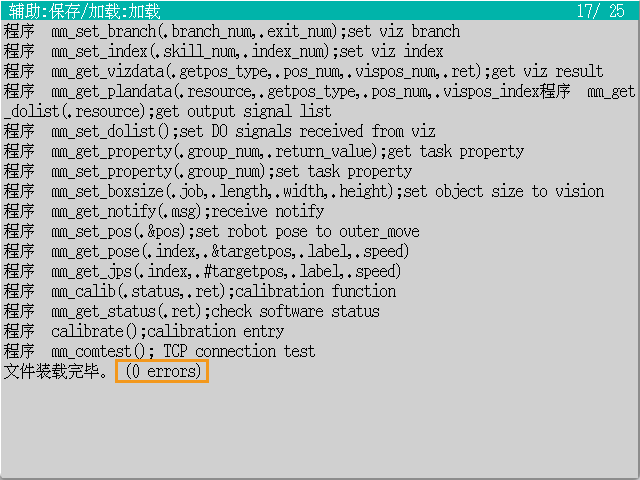
加载完毕后,确认无加载错误。按示教器R键退出。
测试标准接口通信
选择和修改通信测试程序
-
在示教模式下,点击程序窗口,在弹出的菜单中,选择列表。

-
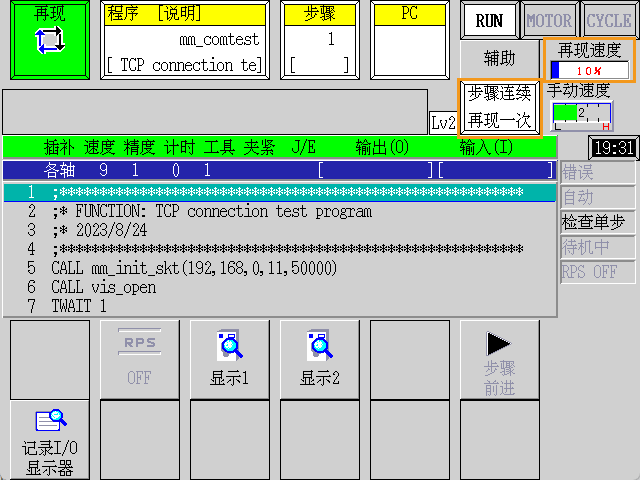
在列表中选择前台程序mm_comtest,按示教器上登录键确认。
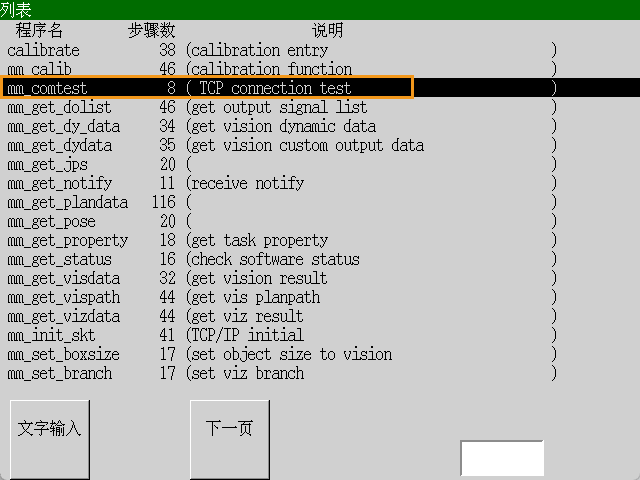
前台程序添加完成后如下图所示。
-
修改mm_comtest程序中mm_init_skt指令的参数,具体操作如下所示。
-
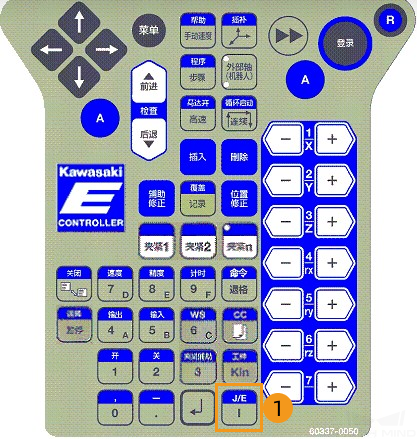
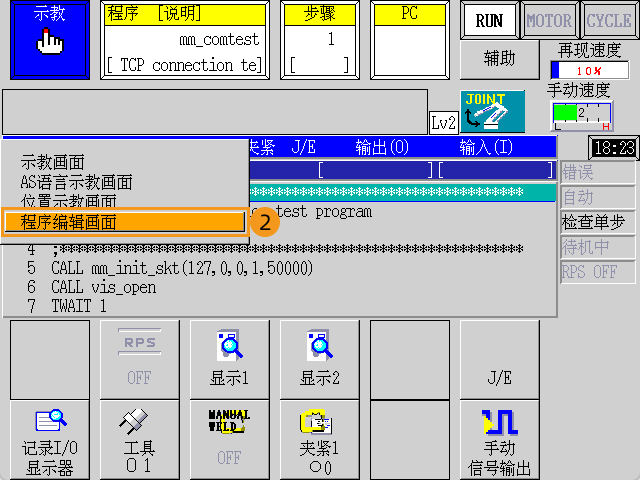
按下示教器上J/E键,在弹出菜单中,点击选择程序编辑画面 ,按登录键确认。
-
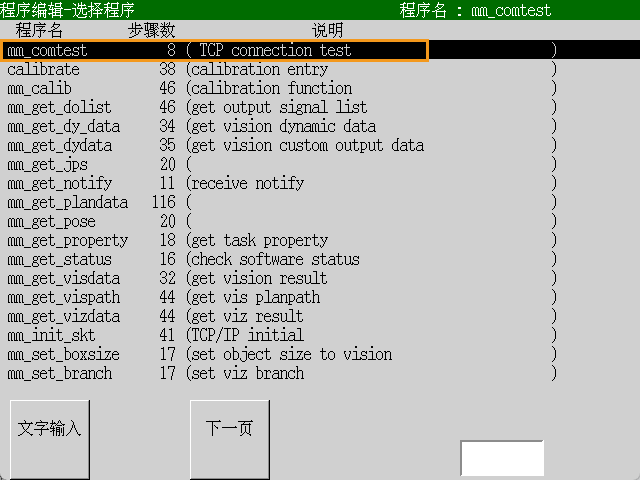
在程序列表中,选择mm_comtest,按登录键确认。
-
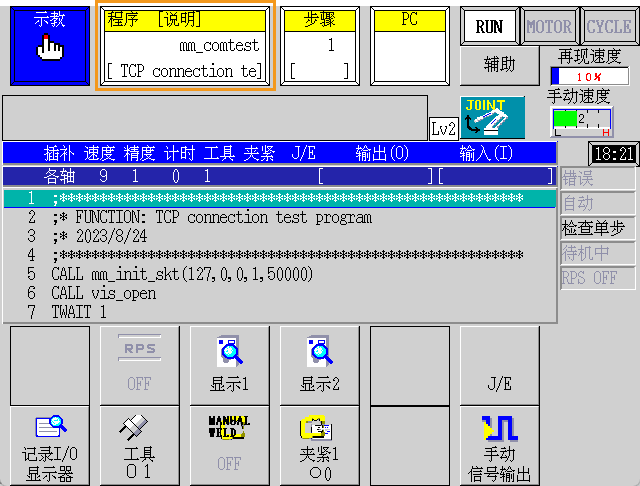
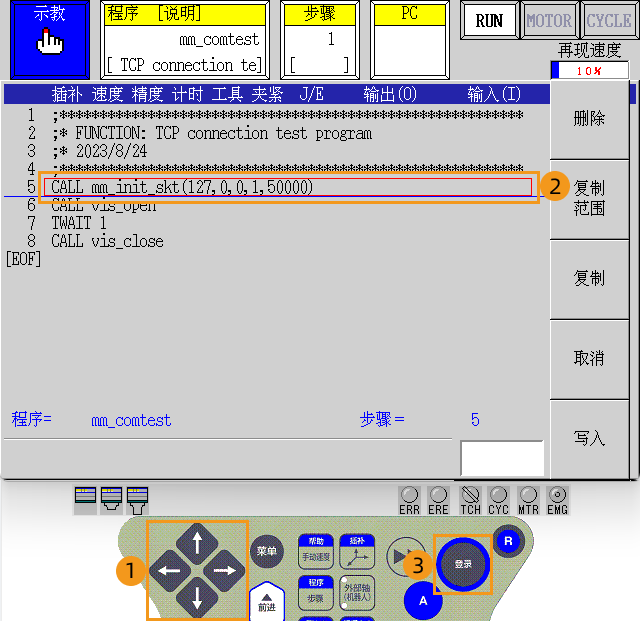
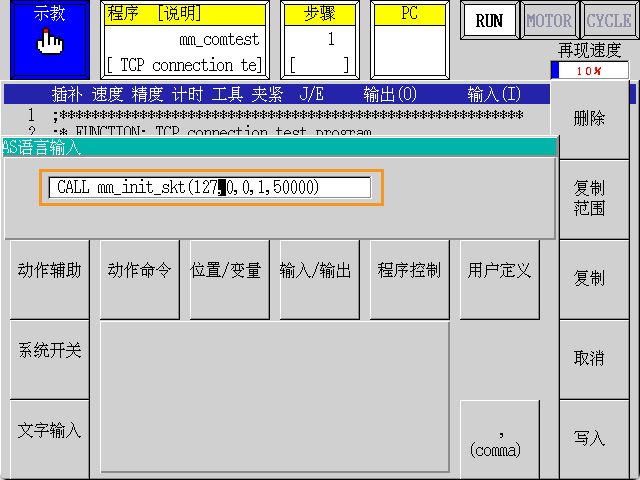
使用示教器上的方向键,将红色框选框移动到mm_init_skt所在行,即确保选中call mm_init_skt(127,0,0,1,50000),然后按登录键确认。
-
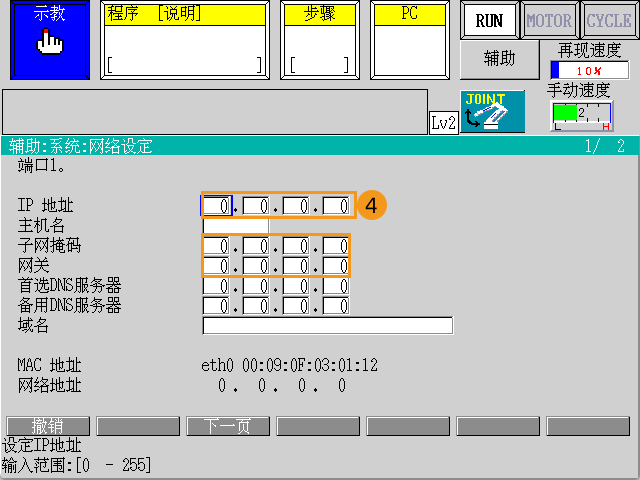
使用示教器上的方向键,移动输入框中的光标到相应位置,将127,0,0,1修改为工控机IP地址,将50000修改为Mech-Vision软件中设置的主机端口号。修改完成后按登录键确认,然后按R键退出。
-
在弹出的确认窗口中选择是,然后选择关闭。
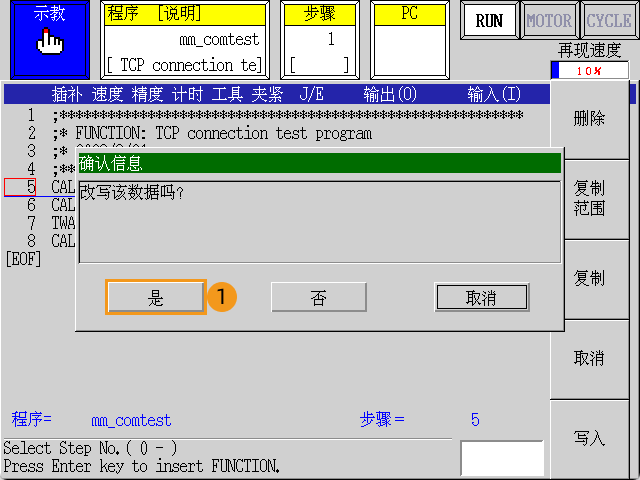
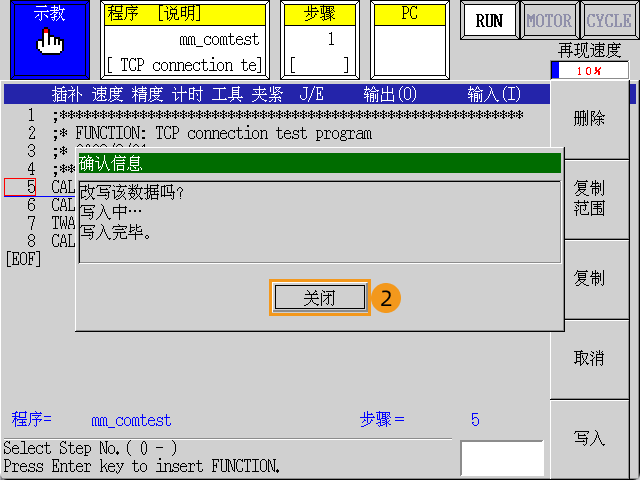
-