TM(达明)接口程序指令说明
一共提供 6 个标准接口组件供用户使用。
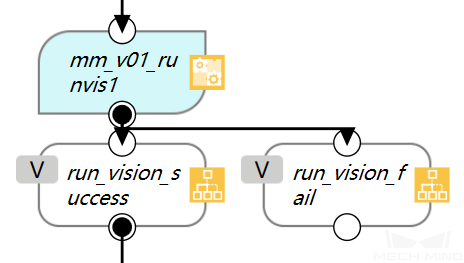
触发 Mech-Vision (Run Vision)
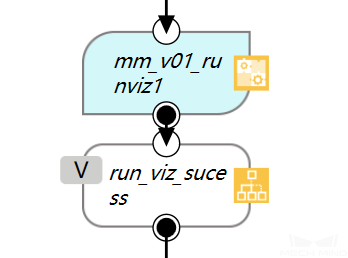
触发 Mech-Viz (Run Viz)
该组件用于触发 Mech-Viz 工程。
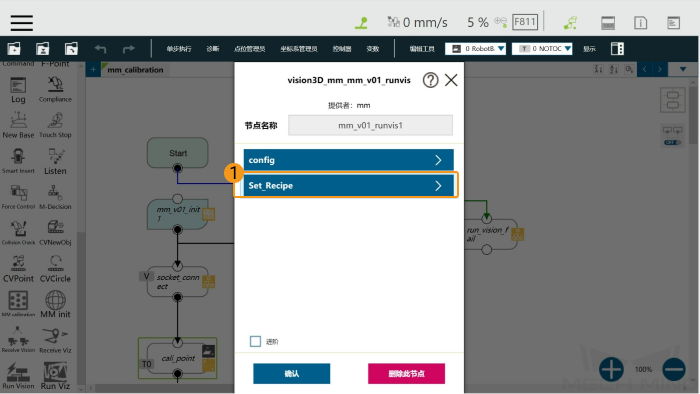
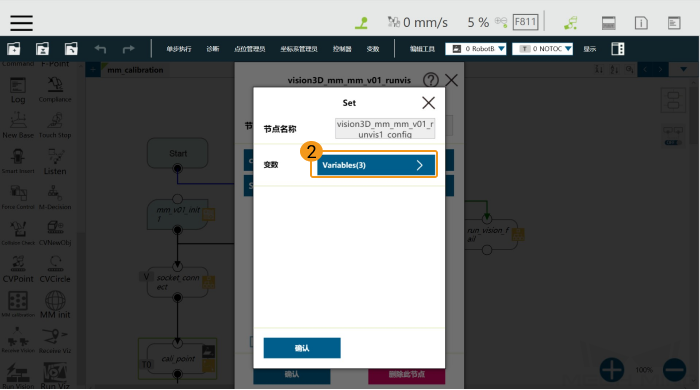
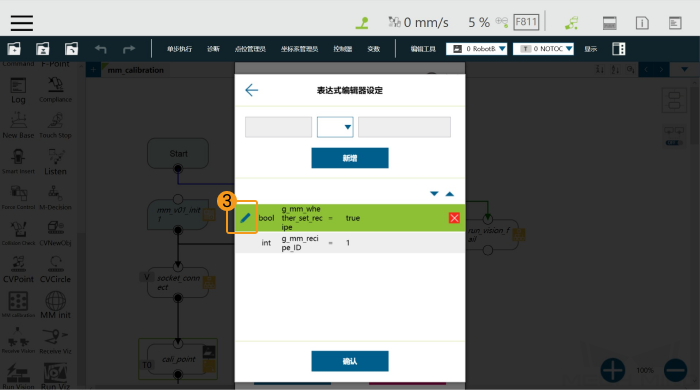
可配置参数
-
Config
-
g_mm_runviz_pose_type : 机器人位姿类型,取值只能为 1,表示关节角类型
-
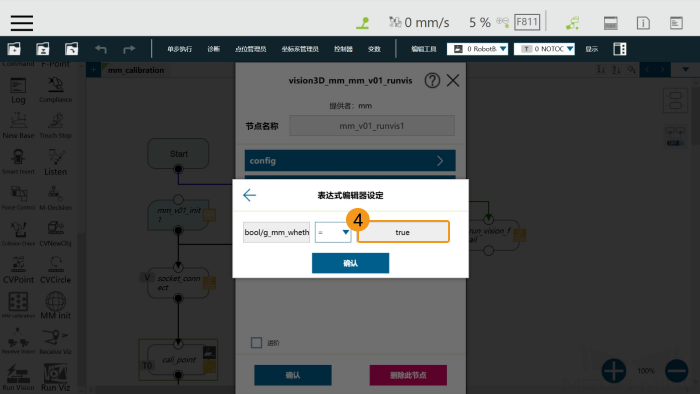
g_whether_after_161 : Mech-Vision和Mech-Viz软件版本是否是 1.6.1 之后的版本,true 表示是,false 表示否
-
-
Set_Branch
-
g_mm_whether_set_branch : 是否设置分支,true 为需要设置分支,false 则为无需要设置分支
-
g_mm_branch_task_ID : 分支步骤名
-
g_mm_branch_out_port : 分支出口号
-
-
Set_Index
-
g_mm_whether_set_index : 是否设置索引,true 为需要设置索引,false 则为无需设置索引
-
g_mm_index_task_ID : 索引步骤名
-
g_mm_index_value : 索引值
-
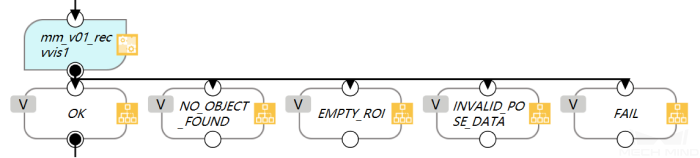
获取视觉结果 (Receive Vision)
该组件用于触发 Mech-Vision 后获取 Mech-Vision 的结果,出口的判断条件为获取视觉结果中的状态码。
该组件执行完毕之后,从 Mech-Vision 返回的结果以字符串数组(string[])的形式保存在 g_mm_socket_recv_array 这个全局变量中,用户可以自己对该变量中的数据进行处理。
出口对应的状态码:
-
NO_OBJECT_FOUND : 1002
-
EMPTY_ROI : 1003
-
INVALID_POSE_DATA : 1006
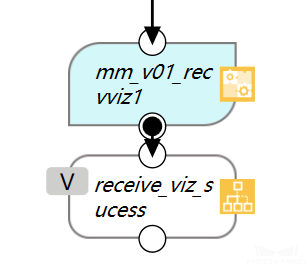
获取规划路径 (Receive Viz)
该组件用于触发 Mech-Viz 后获取 Mech-Viz 的规划路径。
运行完此组件后,所有从 Mech-Viz 返回的结果以字符串数组(string[])的形式保存在 g_mm_socket_recv_array 这个全局变量中,用户可以自己对该变量中的数据进行处理。
所有点位以字符串数组(string[])的形式保存在 g_mm_total_point 这个全局变量中,数组的前 6 个元素为第一个规划点,第 7-12 元素为第二个规划点,以此类推,间隔 6 个元素后规划点递增。
此外,该组件还提供了一个整数型(int)变量 g_mm_recv_viz_time ,用于记录获取规划轨迹组件的触发次数。 该变量从 0 开始计数,对应触发 1 次获取轨迹规划组件,若触发了 2 次获取轨迹规划组件,则该变量的值为 1。
注意事项
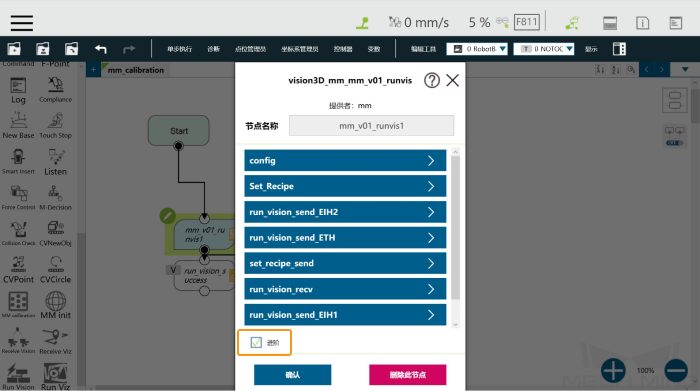
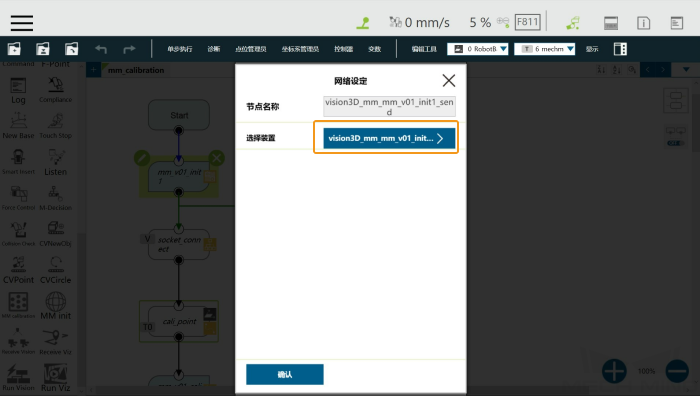
从左侧功能栏拖进的组件(除 init),都需要单击组件左上角的 后,在弹出的窗口中勾选 进阶 。将带有 send 和 recv 变量的网络装置选择为 init 生成的网络装置,需要保证所有组件的网络装置统一。
后,在弹出的窗口中勾选 进阶 。将带有 send 和 recv 变量的网络装置选择为 init 生成的网络装置,需要保证所有组件的网络装置统一。