创建抓取程序
CRX 插件提供抓取流程以供参考,通过少量的编程工作就可以创建出抓取程序。
抓取流程提供两种选项:
-
配合 Mech-Vision 抓取 :适用于仅使用 Mech-Vision 工程且机器人不需要 Mech-Viz 规划路径的场景。
-
配合 Mech-Viz 抓取 :适用于 Mech-Viz 工程与 Mech-Vision 工程一起使用为机器人提供无碰撞的运动路径的场景。
|
下文示例假设已经正确设置当前使用的夹具以及工具中心点(TCP)。 |
配合 Mech-Vision 抓取
以下示例程序将触发 Mech-Vision 拍照,并移动机器人至抓取点。
-
新建一个机器人程序(本示例名称为 MM_SAMPLE_VISION),选择 程式设计 ,从左侧 全部 指令列表中依次按图示拖入指令。
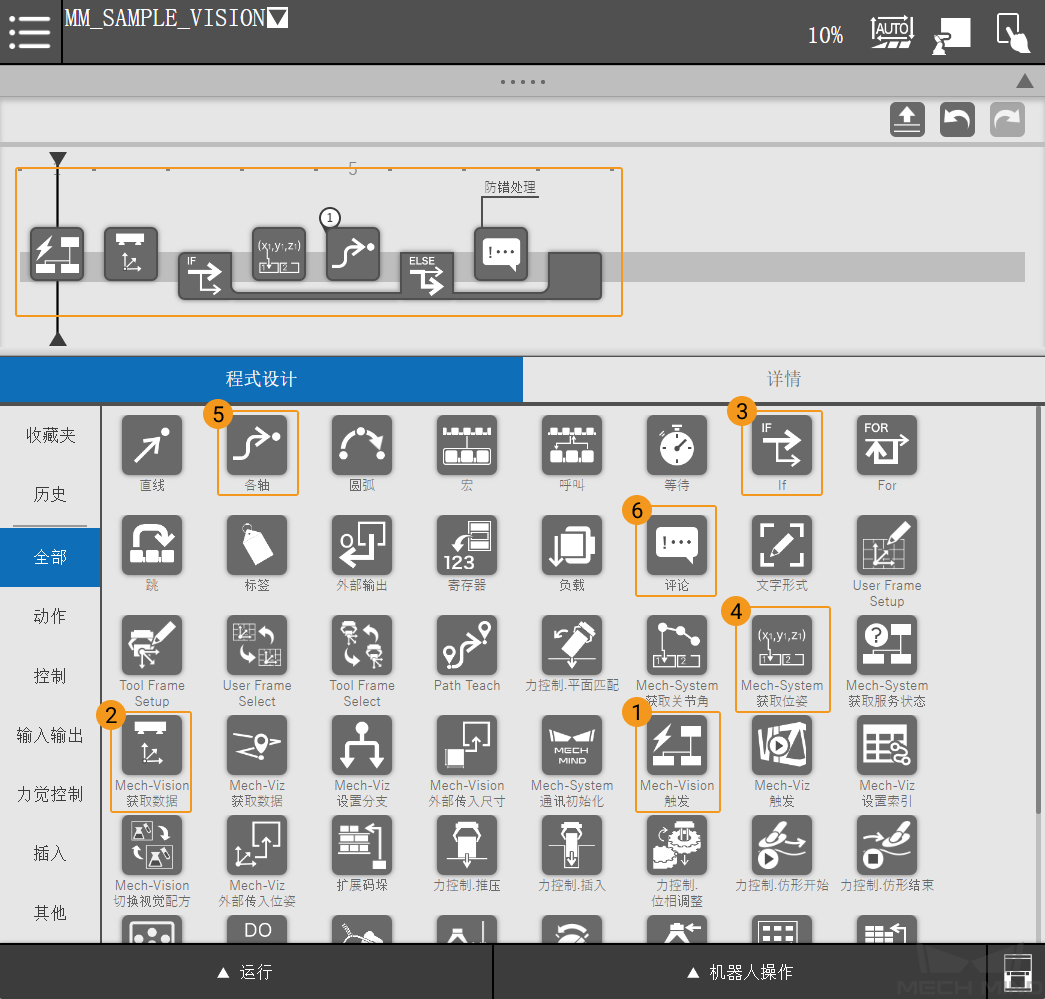
单击流程中的 评论 ,在 详情 选项卡下,填写注释(例如:防错处理),流程中的评论图标上便会显示注释内容。
程序流程介绍:
-
机器人在当前位置执行 Mech-Vision 触发 指令触发 Mech-Vision 工程运行。
-
机器人执行 Mech-Vision 获取数据 指令用于接收 Mech-Vision 工程运行结果。
-
使用 If 指令判断。
-
如果 Mech-Vision 工程运行结果正常,则通过 Mech-System 获取位姿 指令将 Mech-Vision 工程输出的第一个抓取点保存至用户指定的寄存器。机器人通过 各轴 指令移动关节角至第一个抓取点。
-
如果 Mech-Vision 工程运行结果错误,则进行错误处理(本例省略)。
-
-
-
单击 If ,按图示设置条件。
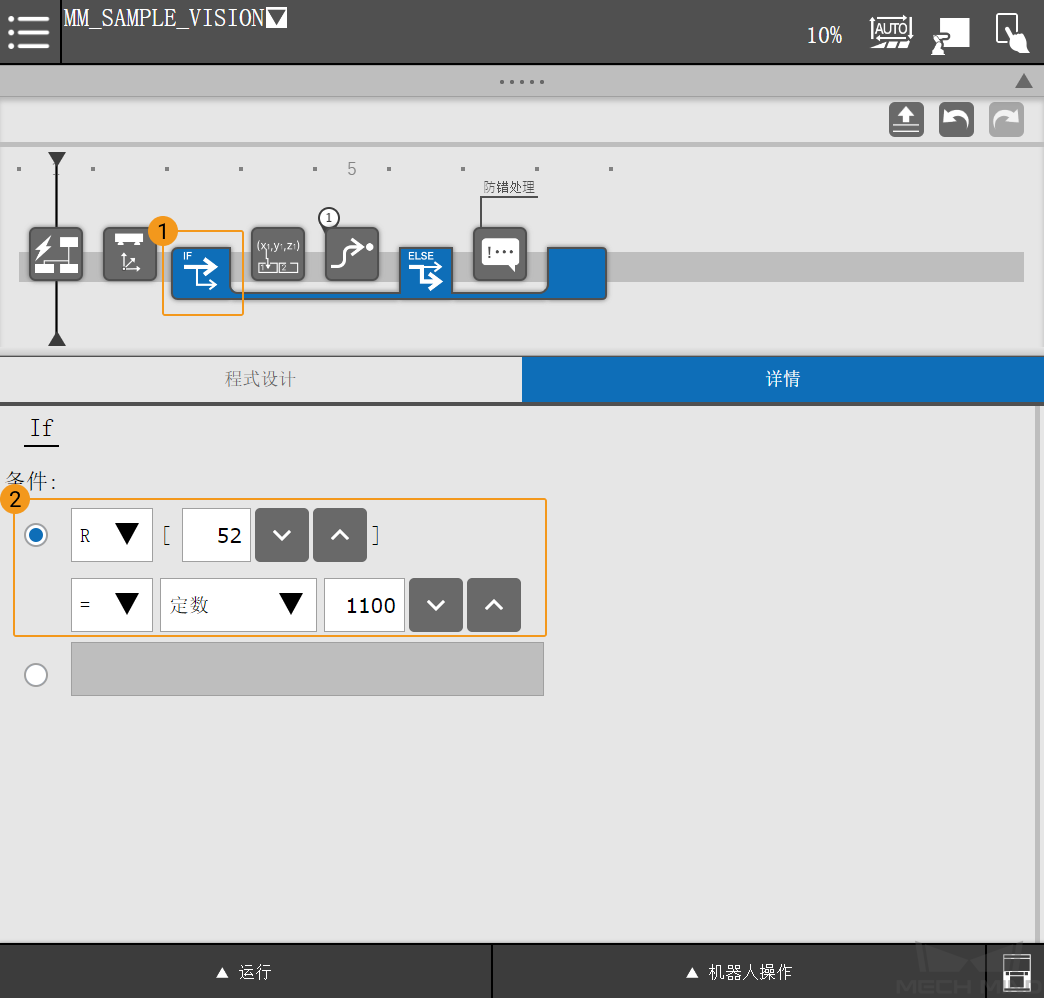
If 指令之前的流程将触发注册的首个 Mech-Vision 工程,将状态码存储至 R[52]。If 指令设置的条件将会判断 R[52] 的值是否为 1100,如果为 1100,表示成功获取视觉点;否则进行防错处理(此处省略)。
-
单击 移动 ,按图示设置位置寄存器。
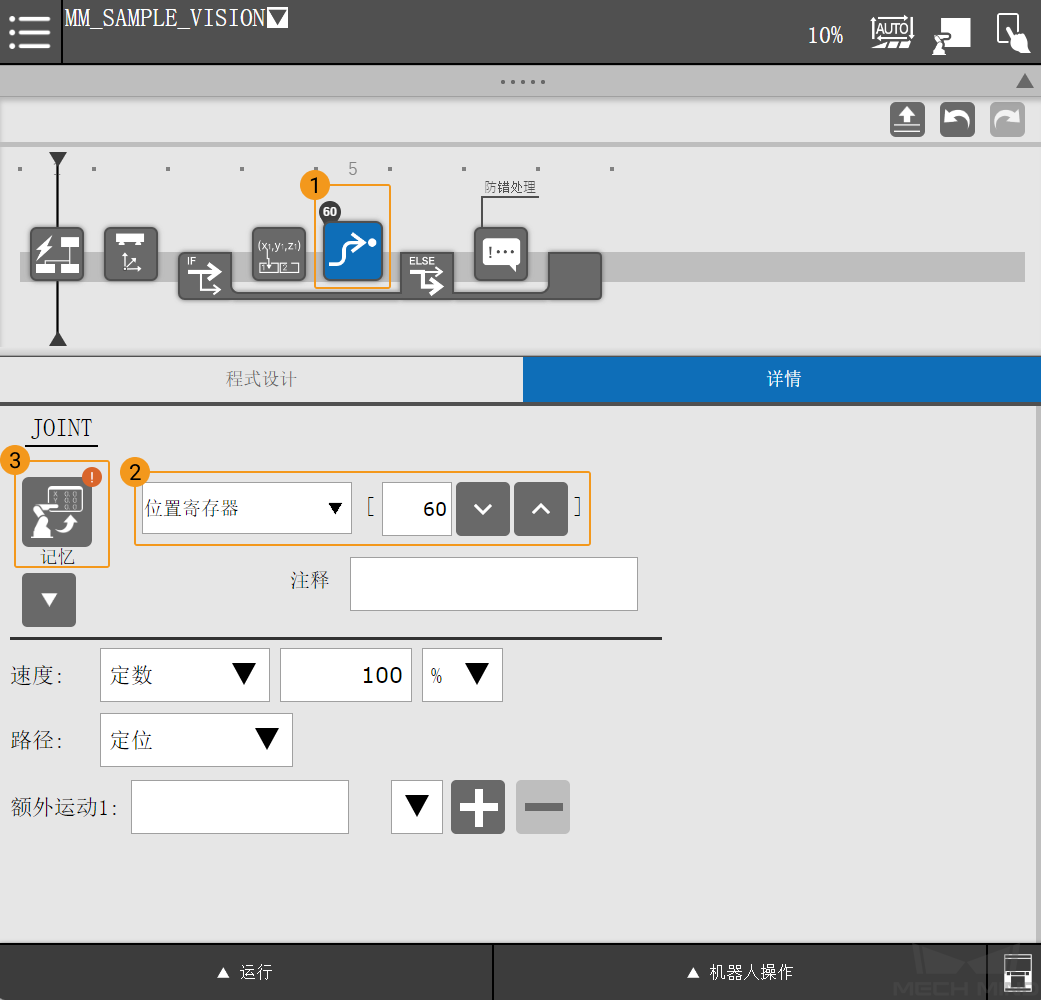
Mech-Vision 工程输出的第一个抓取点以 TCP 形式 被存储至 PR[60]。当成功获取抓取点后,使用 moveJ 移动至 PR[60]。
至此,与 Mech-Vision 工程配合使用的简单工作流程已经完成。在右上角切换自动模式后,单击左下角 运行 选项,将速度稍微降低,然后单击 运行 ,便可运行程序。
配合 Mech-Viz 抓取
Mech-Viz 工程运行至结束的所有点,均可通过 Mech-Interface 发送至机器人。以下示例程序将触发 Mech-Viz 规划,并移动机器人至一个规划点。
-
新建一个机器人程序(本示例名称为 MM_SAMPLE_VIZ),选择 程式设计 ,从左侧 全部 指令列表中依次按图示拖入指令。
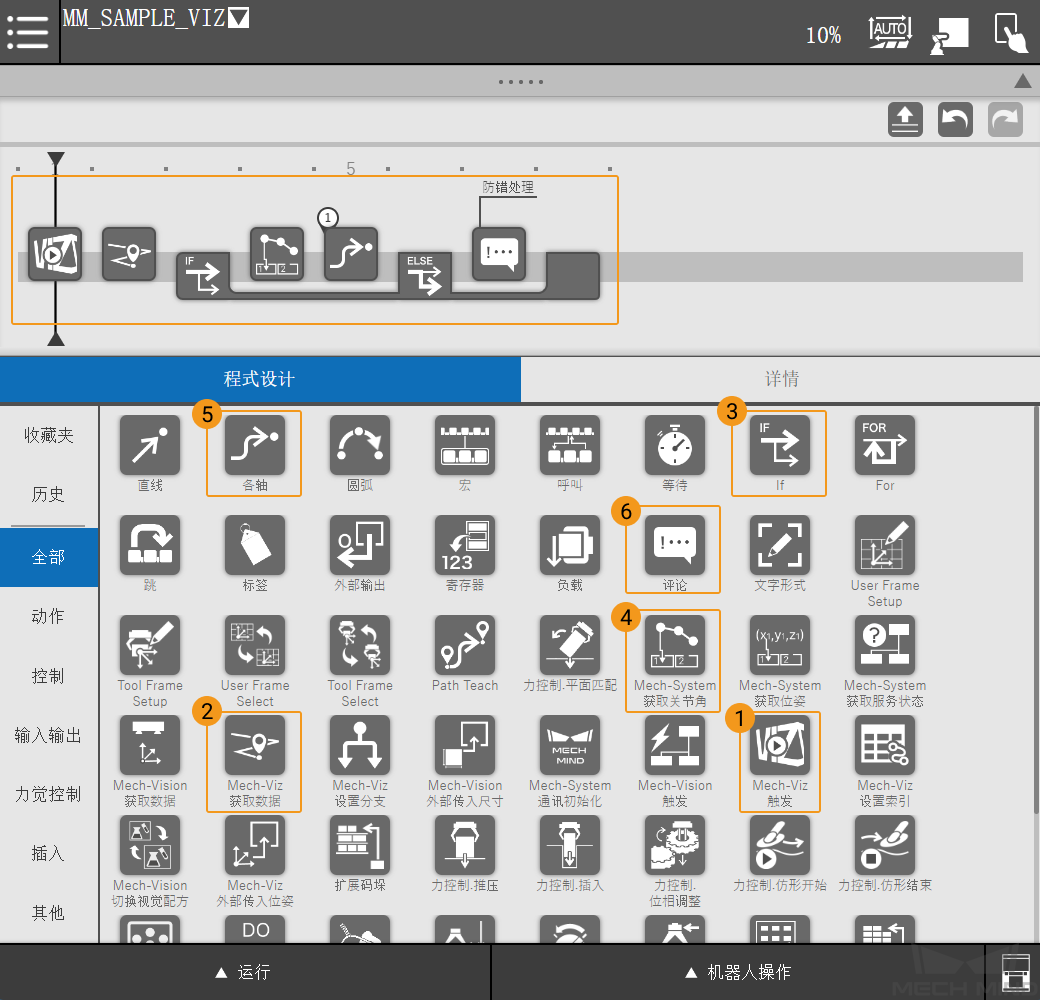
程序流程介绍:
-
机器人在当前位置执行 Mech-Viz 触发 指令触发 Mech-Viz 工程运行。
-
机器人执行 Mech-Viz 获取数据 指令用于获取 Mech-Viz 规划路径。
-
使用 If 指令判断。
-
如果 Mech-Viz 工程运行结果正常,则通过 Mech-System 获取关节角 指令将 Mech-Viz 工程输出的第一个移动点的关节角值保存至用户指定的寄存器。机器人通过 各轴 指令移动关节角至第一个路径点。
-
如果 Mech-Viz 工程运行结果错误,则进行错误处理(本例省略)。
-
-
-
单击 If ,按图示设置条件。
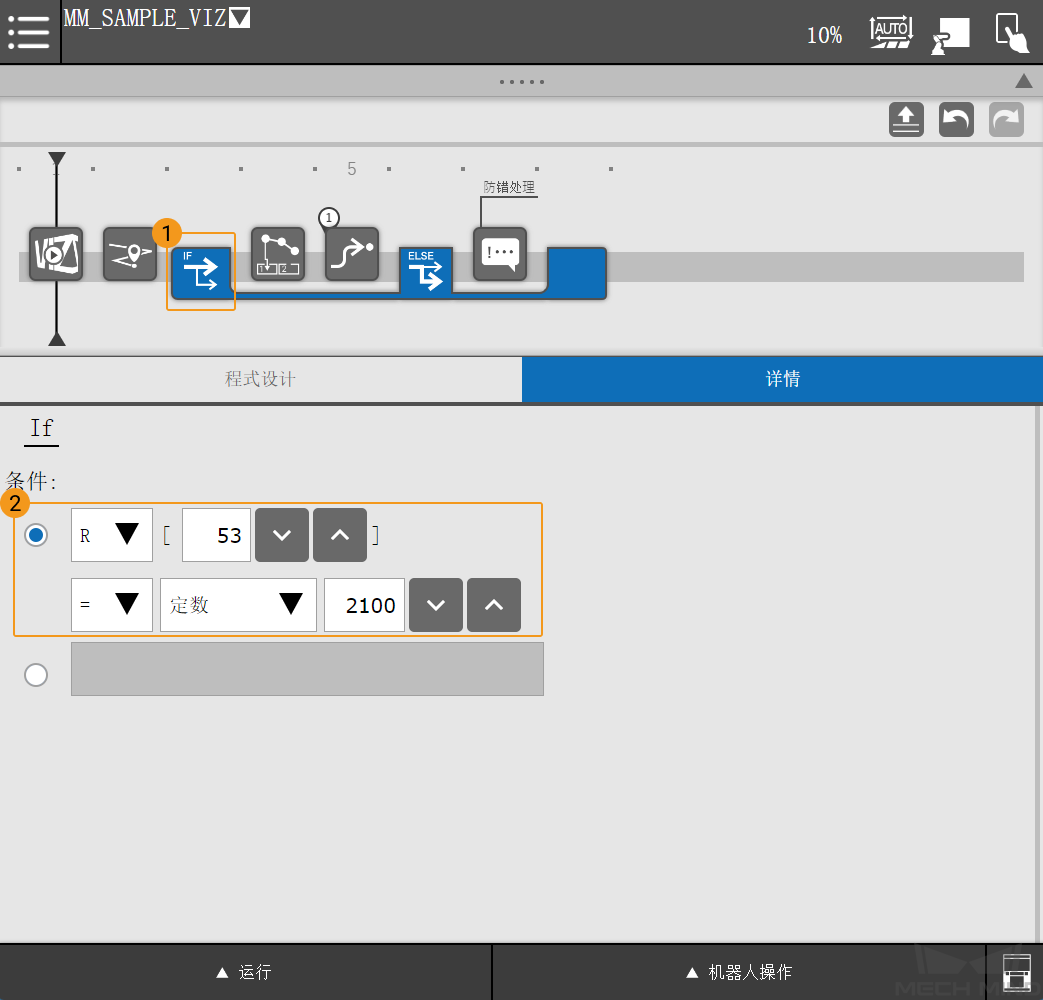
If 指令之前的流程将触发注册的 Mech-Viz 工程,将状态码存储至 R[53]。If 指令设置的条件将会判断 R[53] 的值是否为 2100,如果为 2100,表示执行 Mech-Viz 成功;否则进行防错处理(此处省略)。
-
单击 移动 ,按图示设置位置寄存器。
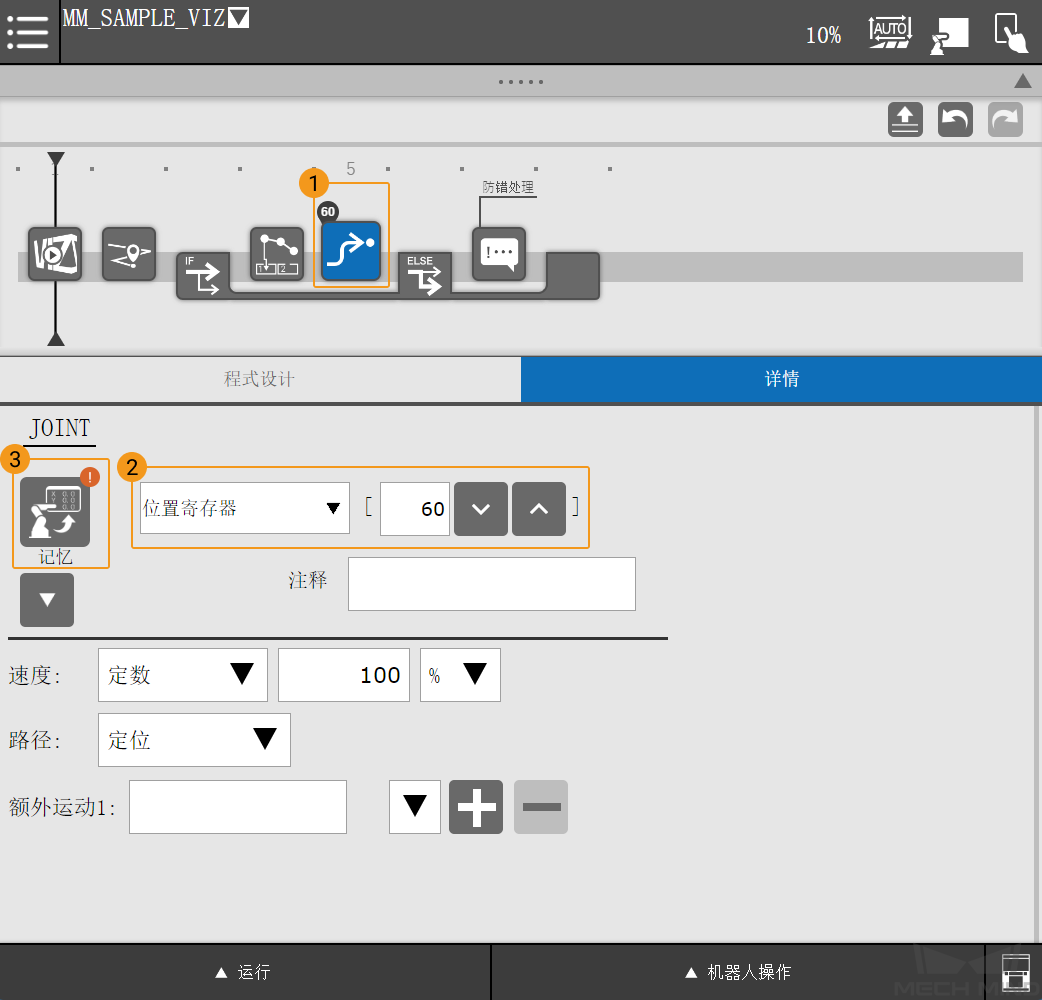
Mech-Viz 工程输出的第一个移动点以 关节角 形式被存储至 PR[60]。当执行 Mech-Viz 工程成功后,使用 moveJ 移动至 PR[60]。
如果需要发送 TCP 数据,更改 “Mech-Viz 获取数据” 指令的返回值为 TCP。之后 “Mech-System 获取关节角” 指令将点位姿以 TCP 形式写入 PR[60]。

至此,与 Mech-Viz 工程配合使用的简单工作流程已经完成。在右上角切换自动模式后,单击左下角 运行 选项,将速度稍微降低,然后单击 运行 ,便可运行程序。