指令说明
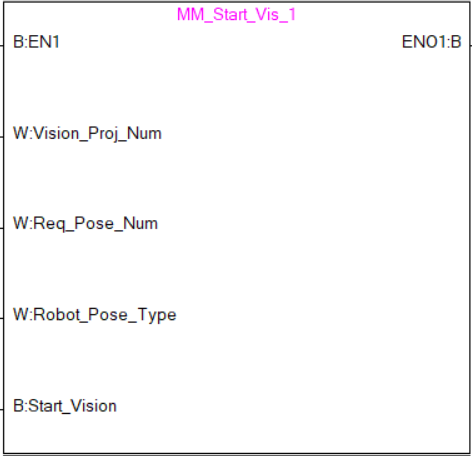
启动 Mech-Vision 工程
该指令用于只有 Mech-Vision 工程,没有 Mech-Viz 的场景。使用该指令触发 Mech-Vision 工程运行,执行相机拍照和视觉识别。
参数说明
输入参数:
-
Vision_Proj_Num:Mech-Vision 工程编号,可在 Mech-Vision 工程列表窗口中查看,工程名称前的数字表示工程编号。
-
Req_Pose_Num: 希望 Mech-Vision 输出的视觉点数量,取值范围为 0~20,其中 0 表示获取所有视觉点。
-
Robot_Pose_Type:机器人位姿类型,指定真实机器人的位姿将以何种形式传 Mech-Vision,取值范围为 0~3。
-
Camera_User.Robot_Pose_JPS:机器人当前关节角,数据类型为一维数组 Array[0..5] of Real。
-
Camera_User.Robot_Pose_Flange:机器人当前法兰位姿,数据类型为一维数组 Array[0..5] of Real。
下表为 Robot_Pose_Type 与 Camera_User.Robot_Pose_JPS 和 Camera_User.Robot_Pose_Flange 参数取值的关系及说明。
| Robot_Pose_Type | Camera_User.Robot_Pose_JPS | Camera_User.Robot_Pose_Flange | 说明 | 适用场景 |
|---|---|---|---|---|
0 |
0, 0, 0, 0, 0, 0 |
0, 0, 0, 0, 0, 0 |
无需向 Mech-Vision 传入机器人位姿 |
工程为 Eye To Hand 模式。若 Mech-Vision 工程中使用“路径规划”步骤,则路径规划的起始点为路径规划工具中设置的 Home 点。 |
1 |
机器人当前关节角 |
机器人的当前法兰位姿 |
需要将机器人的关节角和法兰位姿传入 Mech-Vision |
工程为 Eye In Hand 模式,除桁架机器人外的大多数机器人适用该设定。 |
2 |
0, 0, 0, 0, 0, 0 |
机器人的当前法兰位姿 |
需要将机器人的当前法兰位姿传入 Mech-Vision |
工程为 Eye In Hand 模式,机器人无关节角数据,仅有法兰位姿数据(如桁架机器人)。 |
3 |
机器人路径规划起始点的关节角 |
0, 0, 0, 0, 0, 0 |
需要将机器人路径规划起始点的关节角传入 Mech-Vision |
工程为 Eye To Hand 模式,并且 Mech-Vision 工程中存在“路径规划”步骤,且需要从机器人端设置“路径规划”步骤的起始点。 |
-
Start_Vision:触发 Mech-Vision 工程运行,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,返回 1102 状态码;否则返回对应的错误码。
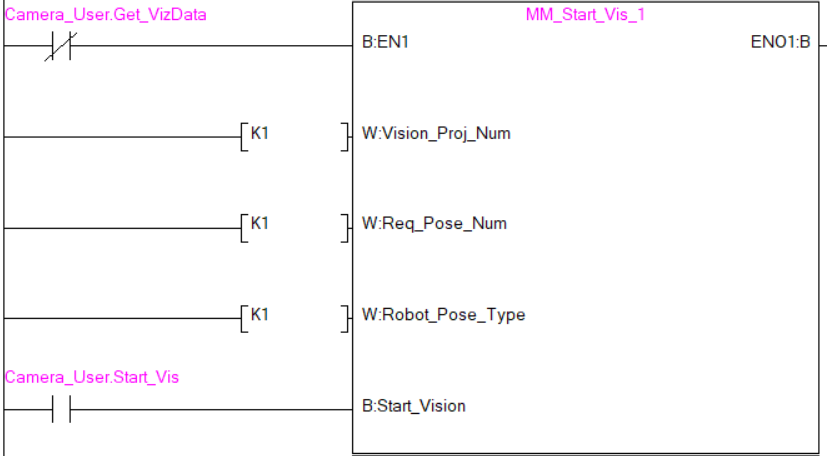
示例
当标签 Camera_User.Start_Vis 出现上升沿时,PLC 将触发并运行 Mech-Vision 工程 1,并希望 Mech-Vision 工程 1 返回视觉结果,同时将机器人当前的关节角和法兰位姿传入 Mech-Vision。
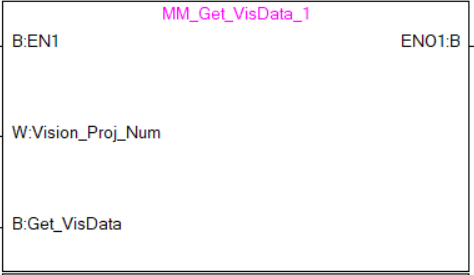
获取视觉目标点
该指令用在 101 指令——启动 Mech-Vision 工程 之后,用于获取 Mech-Vision 输出的视觉点,然后自动将视觉点转换为视觉目标点。
具体转换过程如下所示,即将视觉点包含的位姿转换为对应机器人 TCP。
-
将视觉点包含的位姿绕 X 轴旋转 180°。
-
根据机器人型号的参考坐标系定义,判断是否涉及机器人基座高度,从而确定是否增加相应垂直方向的偏置。
参数说明
输入参数:
-
Vision_Proj_Num:Mech-Vision 工程编号,可在 Mech-Vision 工程列表窗口中查看,工程名称前的数字表示工程编号。
-
Get_VisData:触发获取视觉目标点,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,则返回 1100 状态码;否则返回对应的错误码。
-
Status_of_Pose_Sent:1 表示写入的位姿数据为新数据,PLC 读取位姿数据之后请启动一次 MM_Empty_Target 功能块,将该寄存器置为 0。
-
Number_of_Pose_Sent:获取的视觉目标点数量,范围为 1~20。
-
Target_Pose:视觉目标点的 TCP。
-
Target_Label:视觉目标点的标签。
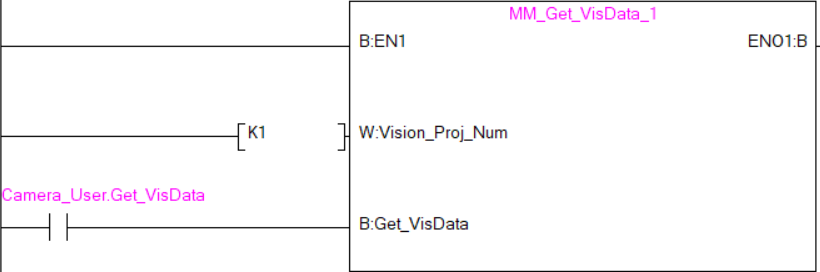
示例
该示例中,当标签 Camera_User.Get_VisData 出现上升沿时,获取 Mech-Vision 工程 1 的视觉目标点。
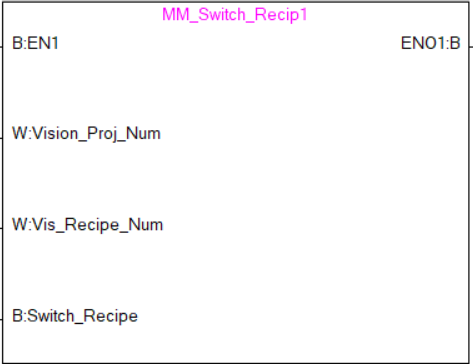
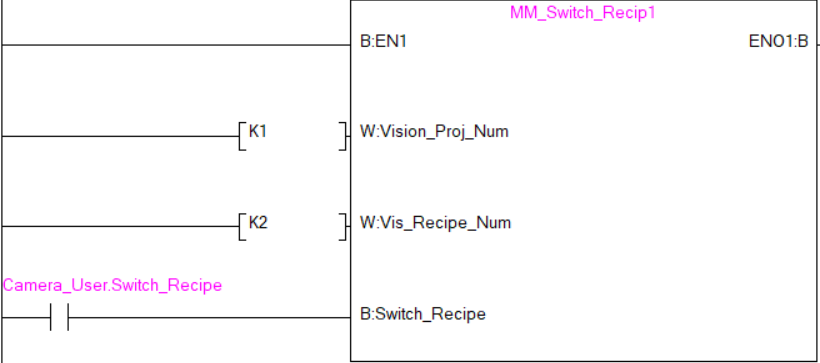
切换 Mech-Vision 配方
该指令用于切换 Mech-Vision 工程内的参数配方,需要在执行 101 指令——启动 Mech-Vision 工程 之前使用。
参数说明
输入参数:
-
Vision_Proj_Num:Mech-Vision 工程编号,可在 Mech-Vision 工程列表窗口中查看,工程名称前的数字表示工程编号。
-
Vision_Recipe_Num:Mech-Vision 工程中的配方编号。
-
Switch_Recipe:触发切换参数配方,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,则返回 1107 状态码;否则返回对应的错误码。
示例
该示例中,当标签 Camera_User.Switch_Recipe 出现上升沿时,Mech-Vision 工程 1 的配方将切换成配方 2。
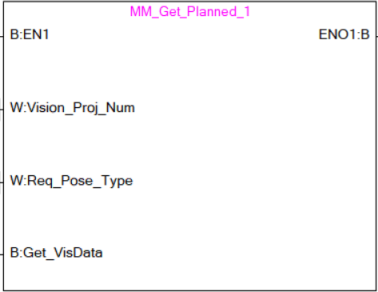
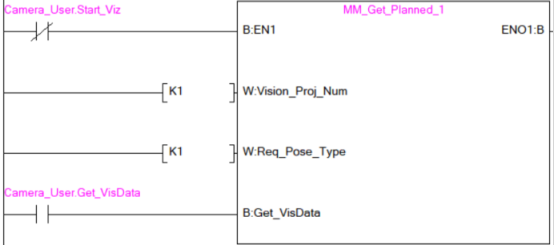
获取 Mech-Vision “路径规划”步骤的结果
在调用 101 指令——启动 Mech-Vision 工程 之后,使用该指令获取 Mech-Vision 中“路径规划”步骤输出的免碰撞规划路径。
在使用该指令时,Mech-Vision “输出”步骤的 端口类型 参数需要设置为“预定义(机器人路径)”。
| 在调用该指令前,请务必将 101 指令——启动 Mech-Vision 工程 的 Req_Pose_Num 设置为 0,以减少调用该指令的次数。若 101 指令——启动 Mech-Vision 工程 的 Req_Pose_Num 设置为 1,则每次调用该指令只会返回一个路径点,只有多次调用该指令才能接收全部路径点。 |
参数说明
输入参数:
-
Vision_Proj_Num:Mech-Vision 工程编号,可在 Mech-Vision 工程列表窗口中查看,工程名称前的数字表示工程编号。
-
Request_Pose_Type: 指定“路径规划”步骤返回的路径点位姿类型。
-
1:路径点将以机器人关节角(JPs)的形式返回。 -
2:路径点将以机器人工具位姿(TCP)的形式返回。
-
| 此处 Request_Pose_Type 和功能函数 MM_Start_Vis、MM_Start_Viz 中的 Robot_Pose_Type, 对应全局标签 MM_Camera 中的 Pose_Type 变量,若三者设定的值不同,则无法同时生效。 |
-
Get_VisData:触发获取 Mech-Vision “路径规划”步骤的结果,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,则返回 1103 状态码;否则返回对应的错误码。
-
Status_of_Pose_Sent:1 表示写入的位姿数据为新数据,PLC 读取位姿数据之后请启动一次 MM_Empty_Target 功能块,将该寄存器置为 0。
-
Number_of_Pose_Sent:Mech-Vision “路径规划”步骤输出的路径点数量,范围为 1~20。
-
Index_of_Vision_Picking_Point:视觉移动路径点在路径中的位置。例如,如果规划路径由以下步骤组成:“定点移动_1”,“定点移动_2”,“视觉移动”,“定点移动_3”,则“视觉移动”步骤位置为 3。
-
Target_Pose:路径点的位姿,位姿类型取决于 Request_Pose_Type。
-
Target_Label:路径点的标签。
-
Speed_Percentage:路径规划工具中设置的速度值。
示例
在该示例中,当 Camera_User.Get_VisData 出现上升沿时,获取 Mech-Vision 工程 1 返回的规划路径,路径点位姿为 JPs 类型。
启动 Mech-Viz 工程
该指令用于既有 Mech-Vision 又有 Mech-Viz 的场景,用于启动 Mech-Viz 工程,调用相应的 Mech-Vision 工程,并规划移动路径。
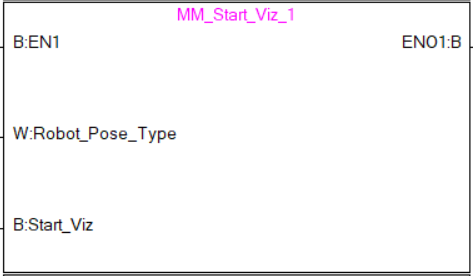
参数说明
输入参数:
-
Robot_Pose_Type:机器人位姿类型,指定真实机器人的位姿将以何种形式传 Mech-Viz,取值范围为 0~2。
-
Camera_User.Robot_Pose_JPS:机器人当前关节角,数据类型为一维数组 Array[0..5] of Real。
-
Camera_User.Robot_Pose_Flange:机器人当前法兰位姿,数据类型为一维数组 Array[0..5] of Real。
下表为 Robot_Pose_Type 与 Camera_User.Robot_Pose_JPS 和 Camera_User.Robot_Pose_Flange 参数取值的关系及说明。
| Robot_Pose_Type | Camera_User.Robot_Pose_JPS | Camera_User.Robot_Pose_Flange | 说明 | 适用场景 |
|---|---|---|---|---|
0 |
0, 0, 0, 0, 0, 0 |
0, 0, 0, 0, 0, 0 |
无需向 Mech-Viz 传入机器人位姿,Mech-Viz 中仿真机器人将从初始位姿 JPs = [0, 0, 0, 0, 0, 0] 开始移动到第一个路径点。 |
工程为 Eye To Hand 模式。不推荐使用该设定。 |
1 |
机器人当前关节角 |
机器人的当前法兰位姿 |
需要将机器人的当前关节角和法兰位姿传入 Mech-Viz,Mech-Viz 中仿真机器人将从传入的关节角开始移动到第一个路径点。 |
工程为 Eye In Hand 模式时,推荐使用该设定。 |
2 |
机器人端自定义的关节角 |
0, 0, 0, 0, 0, 0 |
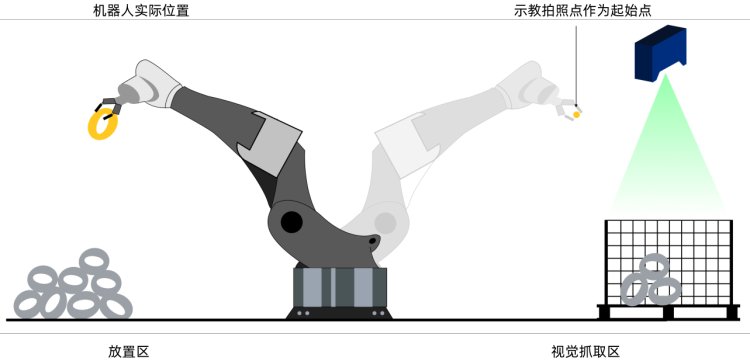
需要将机器人的一个示教点(非当前关节角)传入 Mech-Viz,用于在机器人处于拍照区域外时,提前触发 Mech-Viz 工程规划下一轮路径(如下图),Mech-Viz 中仿真机器人将从传入的示教点开始运动到第一个路径点。 |
工程为 Eye To Hand 模式时,推荐使用该设定。 |
Eye To Hand 模式下应将 Robot_Pose_Type 设为 2 的原因: Eye To Hand 模式下,相机可在机器人回到拍照及抓取区域之前拍照,以提前规划下一轮抓取路径,从而缩短节拍。 若此时将 Robot_Pose_Type 设为 1,即将机器人当前位姿发送给 Mech-Viz 仿真机器人,可能导致仿真机器人与真实机器人轨迹不一致,发生未预知的碰撞,造成危险。 即仿真机器人将直接从当前位姿移动至 Mech-Viz 中第一个移动步骤中设置的位姿,而真实机器人可能在移动至其他位姿后才移动至上述位姿。 所以应将 Robot_Pose_Type 参数设为 2。
-
Start_Viz:触发 Mech-Viz 工程的运行,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,则返回 2103 状态码;否则返回对应的错误码。
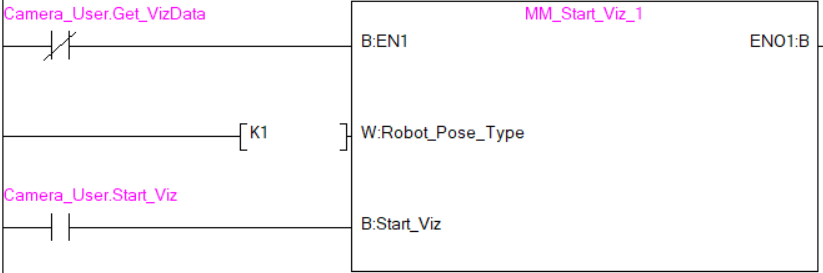
示例
该示例中,当标签 Camera_User.Start_Viz 出现上升沿时,触发 Mech-Viz 工程运行,并将当前机器人的关节角和法兰位姿传入 Mech-Viz。
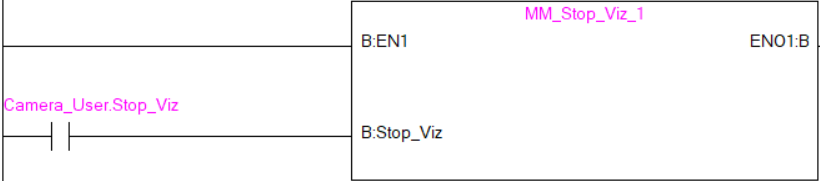
停止 Mech-Viz 工程
该指令用于停止运行 Mech-Viz 工程。如果 Mech-Viz 工程不是死循环,或可以正常停止,则不需要使用该指令。
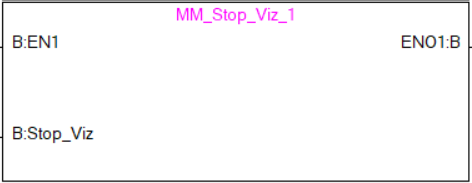
参数说明
输入参数:
-
Stop_Viz:触发停止运行 Mech-Viz 工程,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,返回 2104 状态码;否则返回对应的错误码。
示例
该示例中,当标签 Camera_User.Stop_Viz 出现上升沿时,Mech-Viz 工程停止运行。
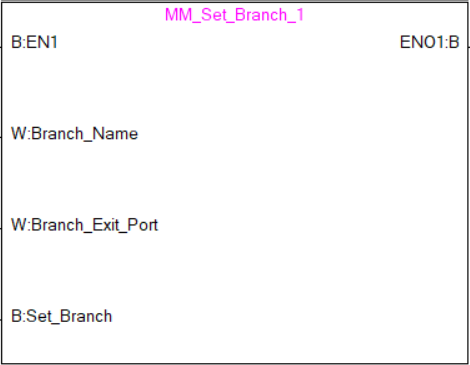
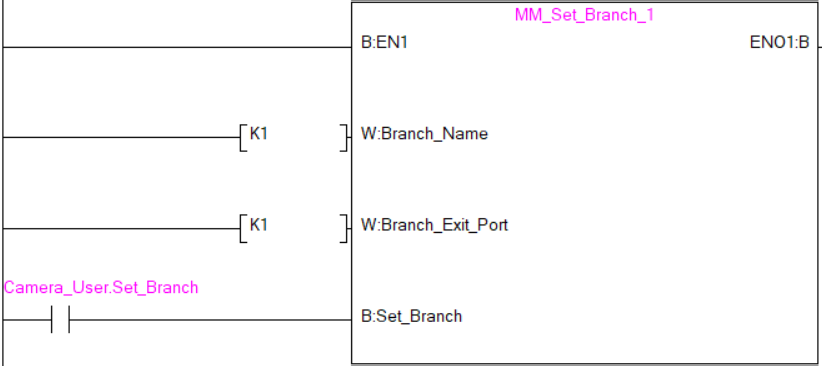
选择 Mech-Viz 分支
当 Mech-Viz 工程中有“消息分支”步骤时,该指令可控制 Mech-Viz 工程中的“消息分支”步骤走指定的出口。在执行该指令前,请先执行 201 指令——启动 Mech-Viz 工程 。 Mech-Viz 运行到分支步骤时会等待该指令发送的分支出口号。
参数说明
输入参数:
-
Branch_Name:分支步骤编号。
-
Branch_Exit_Port:分支的出口号,值为正整数。
出口号为从 1 开始的端口索引号。例如指定的出口为从左往右数第二个端口,那么出口号为 2。 -
Set_Branch:触发设置分支出口,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,则返回 2105 状态码;否则返回对应的错误码。
示例
该示例中,当标签 Camera_User.Set_Branch 出现上升沿时,Mech-Viz 工程运行至步骤编号为 1 的分支步骤时,走第 1 出口。
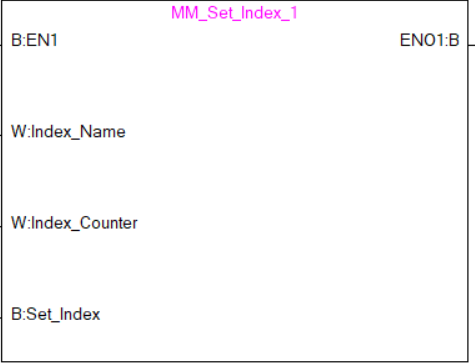
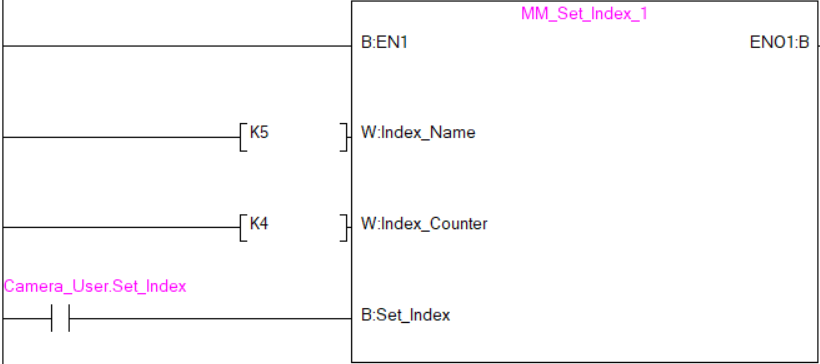
设置移动索引
该指令用于设定步骤的索引参数值。带有索引参数的步骤包括“按序列移动”、“按阵列移动”、“自定义垛型”、“预设垛型”等,一般用于连续或单独指定的移动或其他操作。
在执行该指令前,请先执行 201 指令——启动 Mech-Viz 工程 。
参数说明
输入参数:
-
Index_Name:步骤编号。
-
Index_Counter:下次执行此步骤时应设置的索引值。发送该指令时,Mech-Viz 中的当前索引值将变为该参数值减 1。当 Mech-Viz 工程运行到该指令指定的步骤时,Mech-Viz 中的当前索引值将增加 1,成为该参数的值。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,则返回 2106 状态码;否则返回对应的错误码。
示例
该示例中,当标签 Camera_User.Set_Index 出现上升沿时,Mech-Viz 工程中的步骤编号为 5 步骤的当前索引值为 4-1 = 3。
获取 Mech-Viz 规划路径
该指令用于获取 Mech-Viz 规划的路径。
参数说明
输入参数:
-
Request_Pose_Type: 指定获取的路径点位姿类型。
-
1:路径点将以机器人关节角(JPs)的形式返回。 -
2:路径点将以机器人工具位姿(TCP)的形式返回。
-
| 此处 Request_Pose_Type 和功能函数 MM_Start_Vis、MM_Start_Viz 中的 Robot_Pose_Type, 对应全局标签 MM_Camera 中的 Pose_Type 变量,若三者设定的值不同,则无法同时生效。 |
-
Get_VisData:触发获取 Mech-Viz 工程规划的路径,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,则返回 2100 状态码;否则返回对应的错误码。
-
Status_of_Pose_Sent:1 表示写入的位姿数据为新数据,PLC 读取位姿数据之后请启动一次 MM_Empty_Target 功能块,将该寄存器置为 0。
-
Number_of_Pose_Sent:Mech-Viz 输出的路径点数量,范围为 1~20。
-
Index_of_Vision_Picking_Point:视觉移动路径点在路径中的位置。例如,如果规划路径由以下步骤组成:“定点移动_1”,“定点移动_2”,“视觉移动”,“定点移动_3”,则“视觉移动”步骤位置为 3。
-
Target_Pose:路径点的位姿,位姿类型取决于 Request_Pose_Type。
-
Target_Label:路径点的标签。
-
Speed_Percentage:移动类步骤参数中的非零速度参数百分数值。
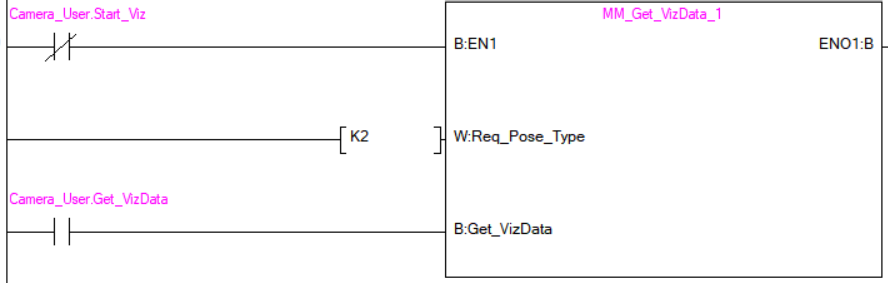
示例
该示例中,当标签 Camera_User.Get_VizData 出现上升沿时,获取 Mech-Viz 工程规划的路径,路径点位姿为 TCP 类型。
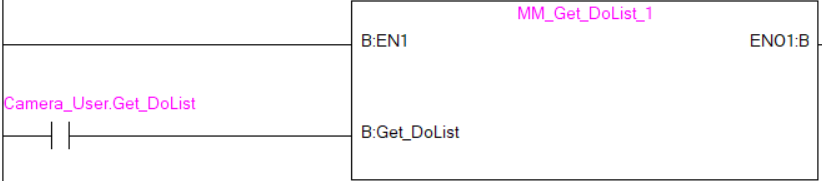
获取 DO 信号列表
该指令用于获取规划的 DO 信号列表。DO 信号列表用于控制多个工具或吸盘分区。在执行该指令前,请先执行 205 指令——获取规划路径 。
请根据模板工程来部署 Mech-Viz 工程,并在工程中设置对应的吸盘配置文件。模板工程为Mech-Vision和Mech-Viz软件安装目录 (Mech-Center/tool/viz_project)下的 suction_zone 工程。
在工程的“设置多个DO”步骤的参数中:
-
在“接收对象”下勾选“标准接口”。
-
勾选“从视觉移动中获取DO列表”。
-
在“选择视觉移动”后的下拉框中,选择需要DO信号列表的视觉移动步骤。
参数说明
输入参数:
-
Get_DoList:触发获取 DO 信号列表,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,则返回 2102 状态码;否则返回对应的错误码。
-
DO_LIST:Mech-Viz 返回 64 个 DO 端口值。
示例
该示例中,当标签 Camera_User.Get_DoList 出现上升沿时,Mech-Viz 返回的 DO 列表将保存到 DO 数组内。
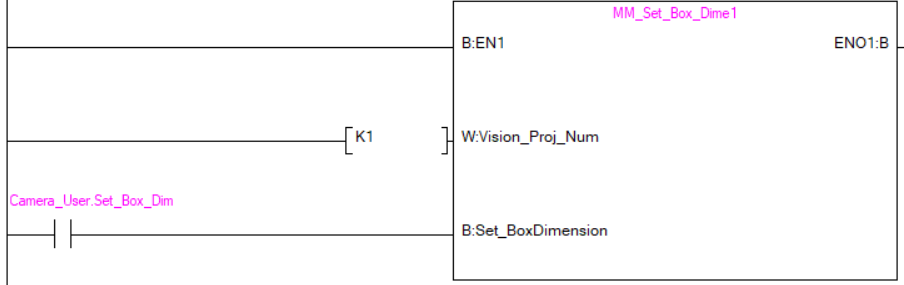
向 Mech-Vision 中传入物体尺寸
该参数用于往 Mech-Vision 工程中动态传入物体尺寸。启动 Mech-Vision 工程前,请先确认物体尺寸。
Mech-Vision 工程中应有“读取物体尺寸”步骤,且勾选 从参数中读取物体尺寸 参数。
参数说明
输入参数:
-
Vision_Proj_Num:Mech-Vision 工程编号,可在 Mech-Vision 工程列表窗口中查看,工程名称前的数字表示工程编号。
-
Camera_User.External_Input_Box_Dimension:向 Mech-Vision 工程传入物体的长、宽、高尺寸,单位是毫米。
-
Set_Box_Dimension:触发向 Mech-Vision 传入物体尺寸,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:若指令执行正常,则返回 1108 状态码;否则返回对应的错误码。
示例
该示例中,当标签 Camera_User.Set_Box_Dimension 出现上升沿时,Mech-Vision 工程中“读取物体尺寸”步骤的物体尺寸设置为 External_Input_Box_Dimension[0–2] 的值。
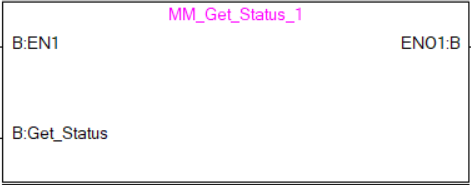
获取软件状态
该指令用于检查软件运行状态(Mech-Vision、Mech-Viz、Mech-Center)。目前该指令只能用于检查 Mech-Vision 工程是否已就绪。
参数说明
输入参数:
-
Get_Status:触发检查 Mech-Vision 工程是否已就绪,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Status_Code:系统自检状态。 1101 状态码为“Mech-Vision 工程已就绪”;其他状态码为 “Mech-Vision 工程未就绪”。
示例
该示例中,当标签 Camera_User.Get_Status 出现上升沿时,获得的状态码将保存到 MM_Camera.Status_Code 中。
清空目标数据
该指令用于清空已经获取的 Target_Pose、Target_Label、Speed_Percentage 数据。
参数说明
输入参数:
-
Start_Empty:触发清空已经获取的 Target_Pose、Target_Label、Speed_Percentage 的数据,上升沿有效。
全局标签 MM_Camera 返回的数据:
-
Target_Pose:已获取的位姿数据。
-
Target_Label:已获取的标签。
-
Speed_Percentage:已获取的非零速度。
示例
在该示例中,当标签 Camera_User.Start_Empty 出现上升沿时,已经获取的 Target_Pose、Target_Label、Speed_Percentage 数据将清空。
获取通知的消息
在触发Mech-Vision或Mech-Viz工程运行后,该指令用于获取“通知”步骤中预先设置的消息(暂时只支持整数)。
| 当Mech-Vision或Mech-Viz工程运行至“通知”步骤时,设置的消息只会在视觉系统中缓存1秒,因此用户在使用该指令时需要控制好调用时间才能获取到消息内容。另外,PLC在使用该消息后,需要自行清除该寄存器数据。 |
参数说明
输入参数:
-
Get_Notify:获取“通知”步骤的消息,上升沿有效。
全局标签 MM_Camera 返回数据:
-
Notify:“通知”步骤的消息,为整数。
示例
假设“通知”步骤中设置的消息为777,PLC在自动模式获取消息的示例如下。
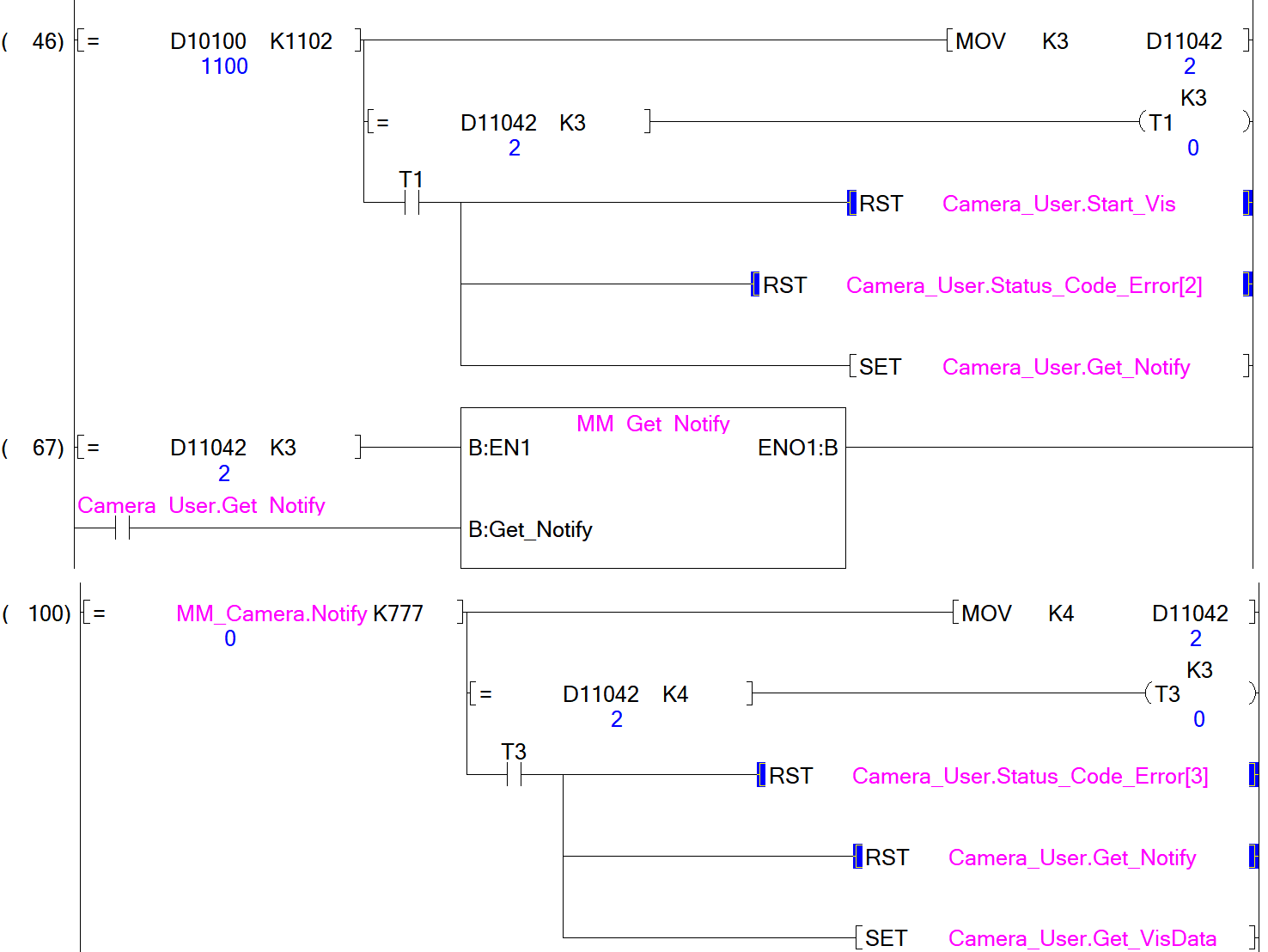
示例说明
在该示例中,在自动模式下将D11042设置为3(即将Camera_User.Step_Num设置为3),此时MM_Camera.Notify不等于777,使能MM_Get_Notify功能;当变量Camera_User.Get_Notify出现上升沿时,获取“通知”步骤中预先设置的消息。 若成功获取到消息,则MM_Camera.Notify等于777;否则MM_Camera.Notify不等于777,PLC在3秒后提示对应报警信息。
附录
状态码(含错误码)定义
请参考《标准接口状态码及错误排查》。