位置姿勢の調整項目の追加による位置姿勢を調整(カスタムモード)
以下では、カスタムモードで位置姿勢の調整項目を追加して位置姿勢を調整する方法について説明します。
|
一度に選択できる位置姿勢の調整項目は1つですが、同じ位置姿勢の調整項目を繰り返し追加することができます。 |
反転軸と目標方向との角度が最小になるように位置姿勢を反転
使用方法
目標方向を設定
目標方向は、 ロボット座標系を使用 、 マニピュレータによる設定 および 外部ステップによる入力 の3つ方法で設定可能です。詳細は下表の通りです。
番号 |
目標方向の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
ロボット座標系を使用 |
ロボット座標系の各座標軸の方向を設定して基準方向を設定します。 |
|
|
2 |
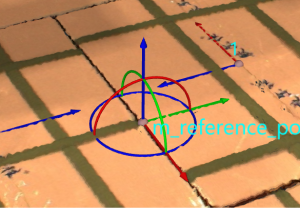
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで目標方向を設定します。 |
|
|
3 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
回転軸と目標方向との角度が最小になるように位置姿勢を回転
使用方法
目標方向を設定
目標方向は、 ロボット座標系を使用 、 マニピュレータによる設定 および 外部ステップによる入力 の3つ方法で設定可能です。詳細は下表の通りです。
番号 |
目標方向の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
ロボット座標系を使用 |
ロボット座標系の各座標軸の方向を選択して基準方向を設定します。 |
|
|
2 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで目標方向を設定します。 |
|
|
3 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
位置姿勢の軸を目標方向に回転
使用方法
目標方向を設定
目標方向は、 ロボット座標系を使用 、 マニピュレータによる設定 および 外部ステップによる入力 の3つ方法で設定可能です。詳細は下表の通りです。
番号 |
目標方向の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
ロボット座標系を使用 |
ロボット座標系の各座標軸の方向を設定して基準方向を設定します。 |
|
|
2 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで目標方向を設定します。 |
|
|
3 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
位置姿勢の軸方向を基準位置姿勢に指す
使用方法
基準位置姿勢を設定
基準位置姿勢は、 マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
基準位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|
位置姿勢の方向を目標位置姿勢の方向に合わせる
使用方法
目標位置姿勢を設定
目標位置姿勢は、マニピュレータによる設定 と 外部ステップによる入力 の2つ方法で設定可能です。詳細は下表の通りです。
番号 |
目標位置姿勢の設定方法 |
説明 |
方法 |
サンプル図 |
1 |
マニピュレータによる設定 |
マニピュレータの位置姿勢を設定することで基準位置姿勢を設定します。 |
|
|
2 |
外部ステップによる入力 |
その他のステップから基準位置姿勢を入力します。 |
|
|