モデルエディタで OBJ モデルを作成
以下の手順を実行して、STL、STP、STEP、無効な OBJ モデルを凸多面体(凸包)で構成される OBJ モデルに変換します。
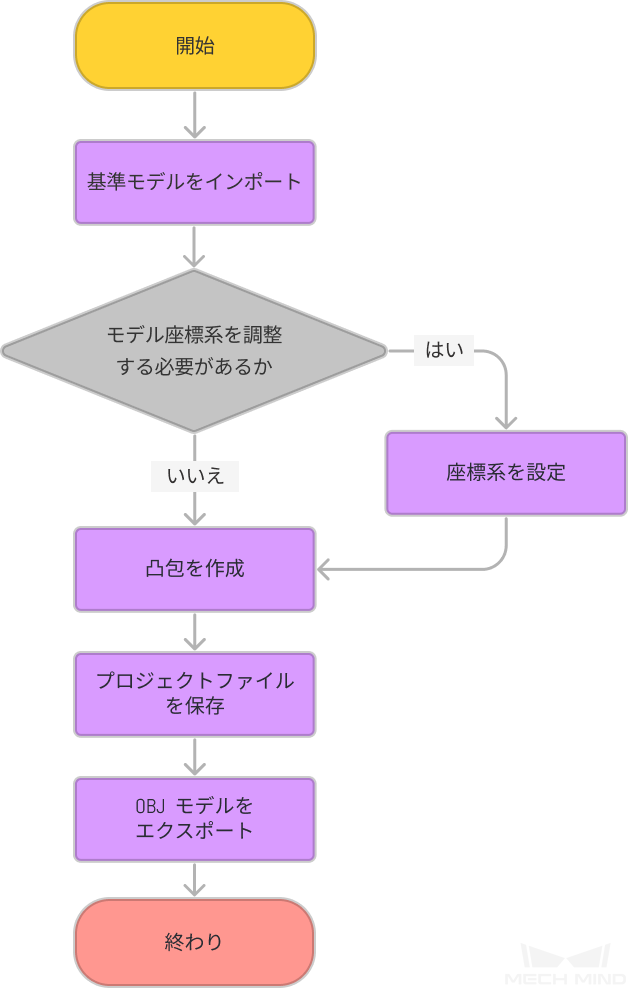
1.基準モデルをインポートする
モデルエディタにインポートできる基準モデルの形式:STL、STP、STEP、OBJ。
以下のいずれかの手順を実行して基準モデルをインポートします。
-
をクリックして基準モデルを選択します。
-
基準モデルをモデルエディタウィンドウにドラッグします。
モデルの実際の寸法に基づいて「単位」を選択して OK をクリックします。
| 「モデルを読み込めませんでした」というメッセージが表示されたら、STEP/STP ファイル有効性の判断を参考してモデルファイルをチェックしてください。 |
2.座標系設定(オプション)
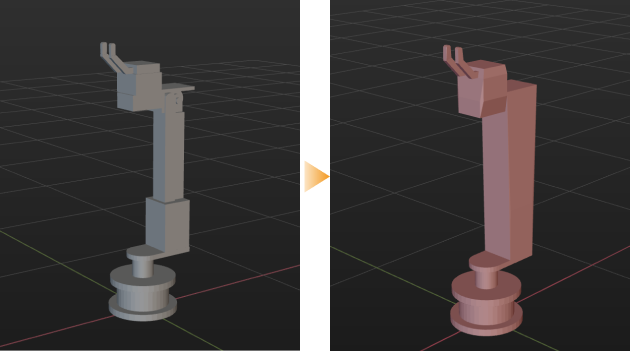
下表には、モデルエディタにおけるロボットハンドモデルの姿勢、「ロボットハンド設定」 ウィンドウで追加されたときの姿勢を示しています。
モデルエディタにおける姿勢 |
「ロボットハンド設定」 ウィンドウで追加されたときの姿勢 |
|
|
|
|

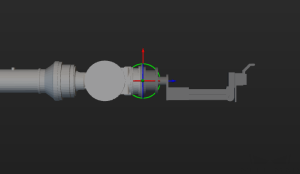
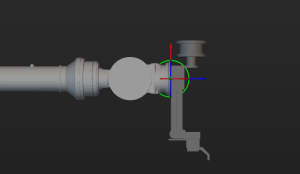
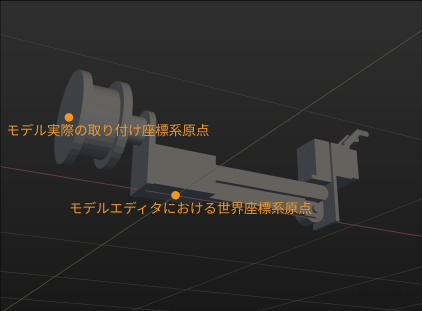
モデル取付位置の座標系原点とモデルエディタにおける世界座標系原点が一致していない場合、ロボットハンドモデルを追加する際にロボットハンドモデルの位置/サイズを調整する必要があります。モデルを使用するたびにその位置を調整する手間を省くために、モデル座標系を調整の指示を従って調整してください。
|
A: モデルエディタにおける世界座標系原点;B: モデル取付位置の座標系原点 |
3.凸包を作成
Mech-Viz では、ロボットハンドの衝突モデルは凸多面体で構成されたものでなければなりません。基準モデルの形に近づけて凸多面体を作成してください。
凸包を作成するには、2つの方法があります。
-
選択ツールで頂点を選択し、ぞれを基準に凸包を作成します。
-
直方体または円柱を作成します。
| 以下の操作を実行する前に、ツールの使用方法を把握しておいてください。選択ツールの使用方法と直方体/円柱を作成するをお読みください。 |
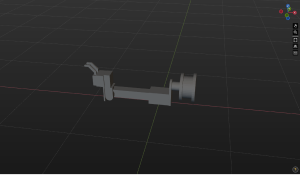
凸多面体を作成するとき、3D 選択ツールでモデル全体を囲んで作成したりしないでください。ロボットハンドをいくつかの部分に分けて各部分ずつ多面体を作成してください。 下図に示すモデルを、9 の部分に分けて多面体を作成することができます。
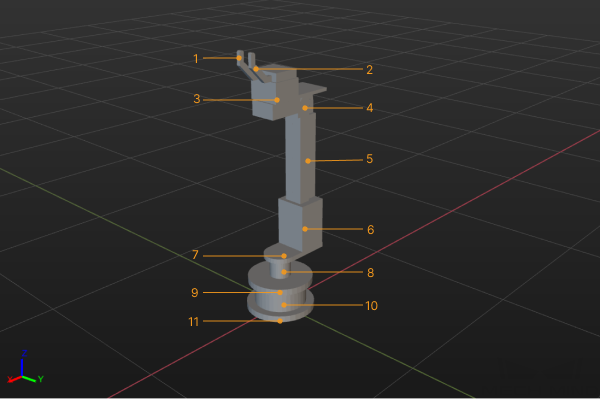
詳しく説明すると:
-
「基準モデル」パレットでモデル名を選択したあと、選択ツール(直方体、円柱、楕円柱)をクリックします。
-
生成された幾何立体を調整し、いずれかの部分の頂点を全部囲みます。凸包を作成をクリックします。
-
9 の部分の凸包を全部作成するまでステップ 2 を繰り返します。
-
基準モデル名の左の
 をクリックして基準モデルを非表示し、凸多面体だけを表示します。
をクリックして基準モデルを非表示し、凸多面体だけを表示します。
|
4.プロジェクトのファイルを保存する
モデルを再編集するために、以下の手順を実行してモデルを .m3d 形式として保存します。
-
をクリックします。
-
保存場所を選択してファイル名を入力します。
-
保存をクリックします。