位置姿勢編集ツール
機能
位置姿勢編集ツールは、位置姿勢の調整を容易にし、位置姿勢の可視化機能を強化し、位置姿勢調整の学習コストを削減することができます。位置姿勢調整、位置姿勢処理ルール、共通設定 の3つ手順を完了することで、位置姿勢の調整、ソート、フィルタリングなどの設定を行うことができます。

-
位置姿勢調整:位置姿勢の並進や方向調整が可能です。
-
位置姿勢処理ルール:実際の要件に基づいて位置姿勢をソートし、要件を満たしていない位置姿勢をフィルタリングします。
-
共通設定:位置姿勢処理以外の設定を行い、位置姿勢と1対1に対応する他のデータを再ソートすることができます。
使用手順
使用手順は以下の通りです。
位置姿勢調整
この手順では、位置姿勢を並進および方向調整できます。詳細は以下の通りです。
位置姿勢処理戦略を選択
位置姿勢の並進や方向調整を行う前に、 位置姿勢処理戦略 を選択する必要があります。位置姿勢処理戦略を追加するには、右側にある + をクリックします。
すべての設定を完了するか、ツールを終了する際に、 保存 をクリックすると、設定内容は選択した位置姿勢処理戦略に保存されます。
座標系設定
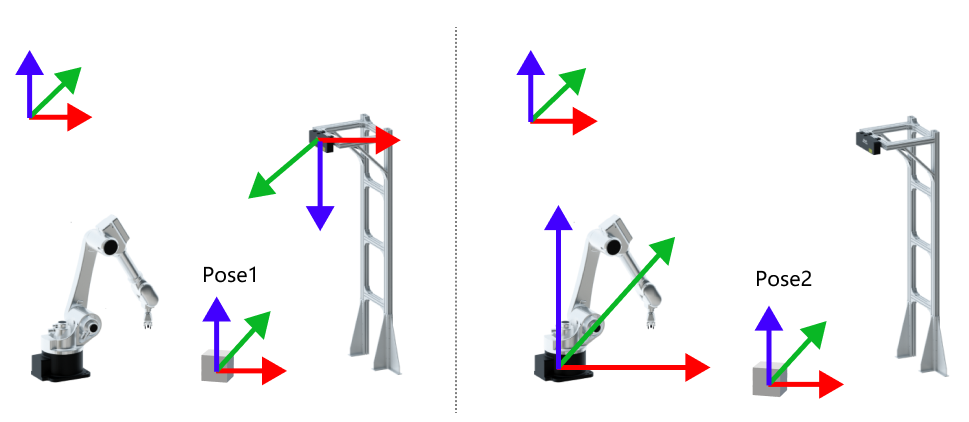
この設定は、カメラ座標系からロボット座標系に位置姿勢を変換するかどうかを選択するためのものです。 位置姿勢をロボット座標系に変換 にチェックを入れると、ロボット座標系における対象物の位置姿勢が出力されます。
下図に示すように、左側はカメラ座標系における対象物の位置姿勢、右側はロボット座標系における対象物の位置姿勢を示しています。
位置姿勢調整
位置姿勢の方向と並進を調整できます。 定義済みモード と カスタムモード に分かれます。カスタムモードがオフの場合は「定義済みモードとなります。
-
定義済み調整項目に従って位置姿勢の方向や並進を調整する場合は、デフォルトの 定義済みモード を使用します。
-
位置姿勢の方向や並進をさらに調整する場合は、 カスタムモード に切り替えます。
定義済みモード
定義済みモードでは、プリセットされた機能に従って、位置姿勢の方向や並進の簡単設定を行うことができます。
-
方向調整
自動合わせ、基準位置姿勢を指す、パレット中心を指す/パレット中心の反対側を指す(デパレタイジング)など、実際の要件に応じて調整項目を選択できます。詳細については、 位置姿勢の方向を調整(定義済みモード) をご参照ください。
-
並進調整
調整項目を追加するには、右側にある + をクリックします。「指定方向に沿って位置姿勢を移動」の項目のみを選択可能です。詳細については、 位置姿勢の並進を調整(定義済みモード) をご参照ください。
位置姿勢処理ルール
実際の要件に基づいて位置姿勢をソートし、要件を満たしていない位置姿勢をフィルタリングします。
位置姿勢をフィルタリング
角度によるフィルタリング と ROI外の位置姿勢を除去 の2つのフィルタリング方法に対応します。詳細については、 定義済みのフィルター項目による位置姿勢をフィルタリング をご参照ください。
共通設定
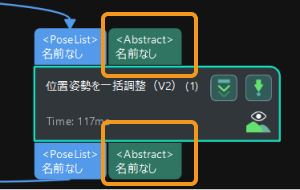
新規ポート数を設定 すると、「位置姿勢を一括調整(V2)」ステップに新たに汎用ポートが追加されます。ソートするデータの出力ポートを追加されたポートにつなぐことができます。
|
最大5つのポートを追加できます。 |
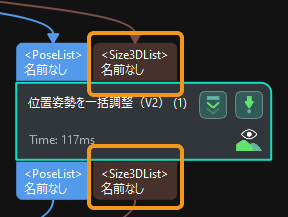
下図に示すように、新規ポート数を設定 を 1 に設定した場合、このステップには汎用入力ポートと汎用出力ポートを1つずつ追加します。
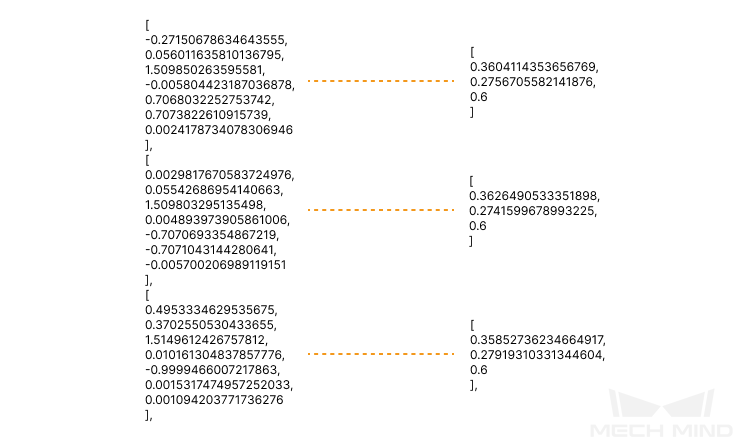
対象物の寸法をソートするには、対象物の寸法を出力するステップの出力ポートを追加された入力ポートにつなぎます。
その後、 データを取得 をクリックすると、入力された対象物の寸法データが位置姿勢のソート結果に従ってソートされます。下図に示すように、ソートされた対象物の寸法データは、位置姿勢との対応関係を保持します。