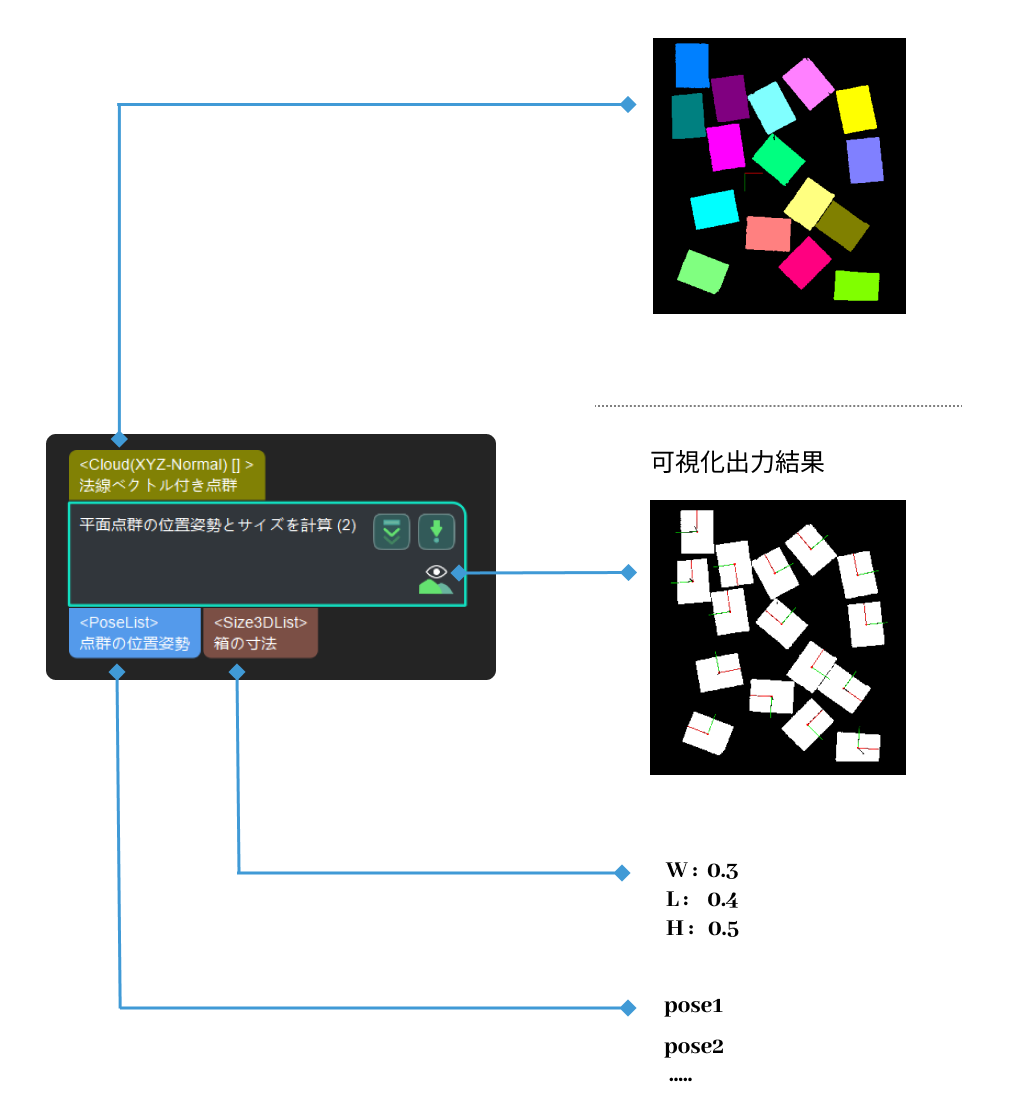
平面点群の位置姿勢とサイズを計算
使用シーン
通常、段ボール箱や麻袋などの平面点群の把持位置姿勢とサイズを計算するために使用されます。
|
このステップを使用する前に、結果に対するノイズの影響を減らすために、点群をフィルタリングしてクラスター化する必要があります。 |
よく使うパラメータの調整説明
位置姿勢計算の設定
|
位置姿勢中心の計算方法 と 位置姿勢の姿勢の計算方法 は対応させる必要があります。
|
- 位置姿勢中心の計算方法
-
パラメータ説明:このパラメータは、位置姿勢の位置中心を指定するために使用されます。
オプション:
-
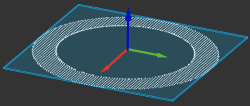
BoundingRectCenter(点群境界ボックスの中心):初期値となります。下図の右側に示すように、対象物の点群が均等に分布している場合に使用します。
-
CloudCenter(点群中心):下図の左側に示すように、対象物の点群が均等に分布していない場合に使用します。

調整アドバイス:実際の状況に応じて設定してくだい。
-
- 位置姿勢方向の計算方法
-
パラメータ説明:このパラメータは、位置姿勢の向きを指定するために使用されます。
オプション:
-
BoundingRectOrientation(点群境界ボックスの姿勢):上図の右側に示すように、対象物の点群が均等に分布している場合に使用します。
-
CloudOrientation(点群の中心姿勢):上図の左側に示すように、対象物の点群が均等に分布していない場合に使用します。
調整アドバイス:実際の状況に応じて設定してくだい。
-
- エッジ揃えの外接長方形を使用
-
パラメータ説明:このパラメータは、外接長方形の辺を対象物の輪郭とできるだけ平行にするかどうかを決定します。チェックを外すと、最小の外接長方形が使用されます。
初期値:チェックを入れない。
調整アドバイス:実際の状況に応じて設定してくだい。
- エッジを揃えた検索半径
-
パラメータ説明:このパラメータは、外接長方形が対象物の輪郭点の位置を合わせるかどうかを判断するために使用されます。単位はピクセルです。輪郭点と外接長方形との距離がこの値より小さい場合、輪郭点が外接長方形の位置を合わせるとみなされます。
初期値:3px
エッジ揃えの外接長方形 にチェックを入れると、このパラメータを設定可能です。
箱の位置姿勢計算の設定
|
以下のパラメータは箱のみに適用され、麻袋の計算には使用できません。 |
- 箱の高さを計算
-
パラメータ説明:このパラメータは、Z方向における箱の長さを計算するために使用されます。
初期値:チェックを入れない。
調整アドバイス:箱のZ方向の長さを計算するときにのみチェックを入れます。
- 箱の底部の固定高さ
-
パラメータ説明:このパラメータは、箱のZ方向の高さの計算を容易にするために、箱を載せる台の高さを設定するために使用されます。一般的には、ロボット座標系で箱が搬送されるコンベアや積み上げ台の高さを値とします。
初期値:0.000 mm
調整アドバイス:実際の状況に応じて設定してくだい。
箱の高さを計算 にチェックを入れると、このパラメータを設定可能です。