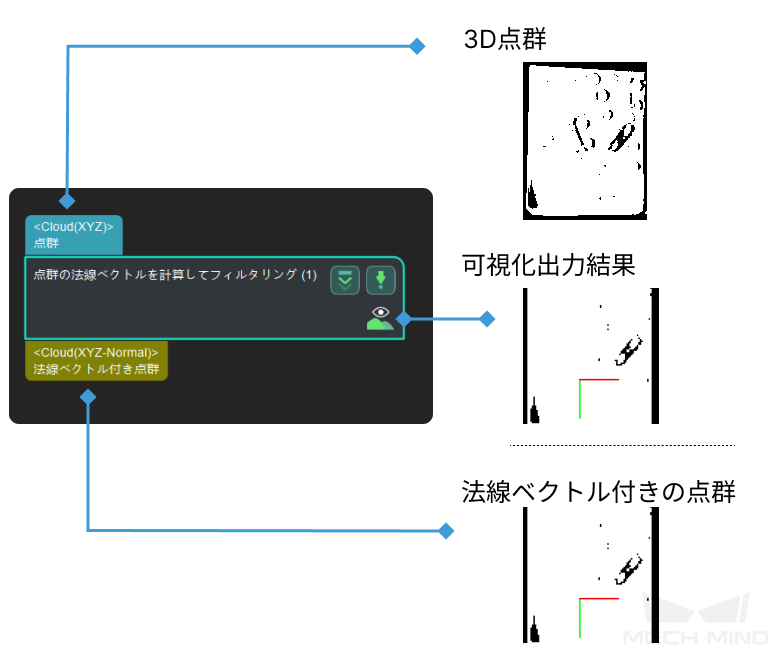
点群の法線ベクトルを計算してフィルタリング
|
このステップの内容は、現在メンテナンス中です。このステップに関する詳細が必要な場合は、当社(docs@mech-mind.net)までお問い合わせください。 |
使用シーン
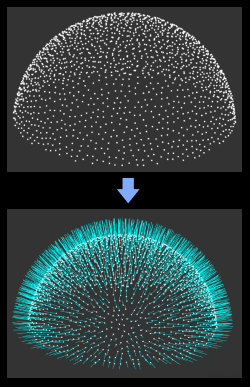
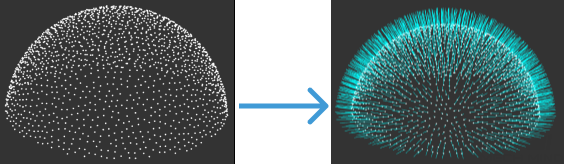
元の点群に法線ベクトルを追加し、外れ値を除去します。通常、 カメラから画像を取得 、 深度画像を点群に変換 ステップの後で使用されます。
|
このステップの内容は、現在メンテナンス中です。このステップに関する詳細が必要な場合は、当社(docs@mech-mind.net)までお問い合わせください。 |
元の点群に法線ベクトルを追加し、外れ値を除去します。通常、 カメラから画像を取得 、 深度画像を点群に変換 ステップの後で使用されます。