関節角度の制約条件
概念
| 肩 |
腕関節の中心と軸 1 との相対関係。軸1とは、ロボット1軸の回転中心軸です。 |
| 肘 |
腕関節と前腕との相対関係。前腕とはロボットの 2、3 軸の回転中心軸です。 |
| 手首 |
ロボット 5 軸です。5 軸角度の正負は、腕の回転を表します。 |
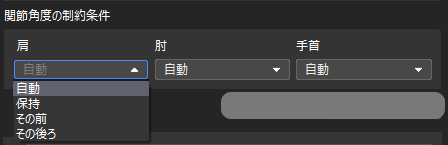
オプション
| 自動 |
関節を制約しません。各軸の回転が最小の位置姿勢を最適解とします。 |
| 保持 |
ロボットの現在の状態を状態Aとしてロボットを制約します。Mech-Viz プロジェクトでは、次の移動の解を選択するとき、状態 A と一致する解を有効なものとします。ロボット 3 軸を例に、現在の状態では 3 軸は正方向に向いているので移動の解を求めるときに 3 軸だけが正方向の解を有効とします。 |
| その前 |
腕関節中心が軸 1 の前にあります。 |
| その後 |
腕関節中心が軸 1 の後ろにあります。 |
 をクリックするとこの位置姿勢が対応するすべての関節角度が表示されます。
いずれかをクリックしてシミュレーションエリアでロボットの姿勢を表示でき、異なる制約条件の下でその他の可能な関節角度を確認することができます。
をクリックするとこの位置姿勢が対応するすべての関節角度が表示されます。
いずれかをクリックしてシミュレーションエリアでロボットの姿勢を表示でき、異なる制約条件の下でその他の可能な関節角度を確認することができます。
-
関節角度の制約条件は 6 軸ロボットにのみ有効です。4 軸ロボットは、肩や肘、手首の回転はないとされます。
-
ソフトウェアでは、この機能はカスタマイズパレットパターンと事前計画したパレットパターンに対応できません。デフォルトでは「自動」に設定し、肩、肘、手首を変えないのでロボットが動作中に特異点を経過しません。