精度誤差分析ツール
実際の生産では、カメラの内部パラメータの精度が低く、ロボットの把持ずれなどの問題が頻繁に発生し、このような問題の原因は非常に多岐にわたります。
本章では、精度誤差分析ツールを使用してこれらの問題に対処する方法について説明します。
ツール紹介
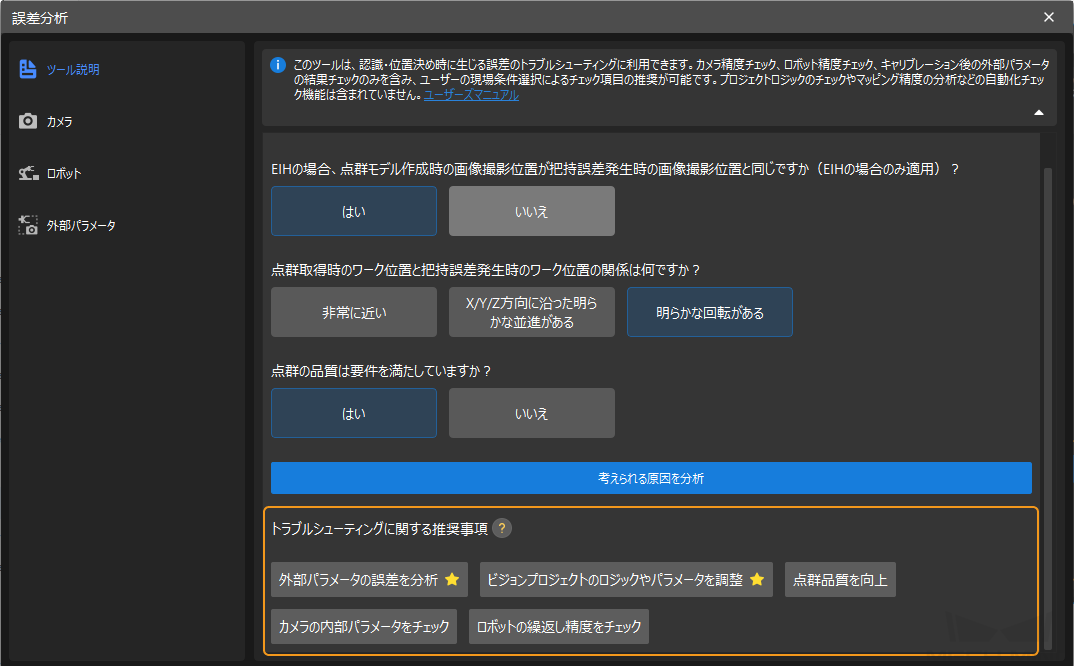
このツールは、認識・位置決め時に生じる誤差のトラブルシューティングに利用できます。カメラ精度チェック、ロボット精度チェック、キャリブレーション後の外部パラメータの結果チェックのみを含み、ユーザーの現場条件選択によるチェック項目の推奨が可能です。プロジェクトロジックのチェックやマッピング精度の分析などの自動化チェック機能は含まれていません。
このツールを開いた後、実際の現場における問題に基づいて以下の項目を選択してください。
-
EIHの場合、点群モデル作成時の画像撮影位置が把持誤差発生時の画像撮影位置と同じですか?
-
点群取得時のワーク位置と把持誤差発生時のワーク位置の関係は何ですか?
-
点群の品質は要件を満たしていますか?
選択が完了したら、 考えられる原因を分析 ボタンをクリックすると、トラブルシューティングの 推奨事項 が表示されます。
|
アスタリスクのついたチェック項目は、誤差の原因として最も高い可能性があるため、注意深く確認しください。 |