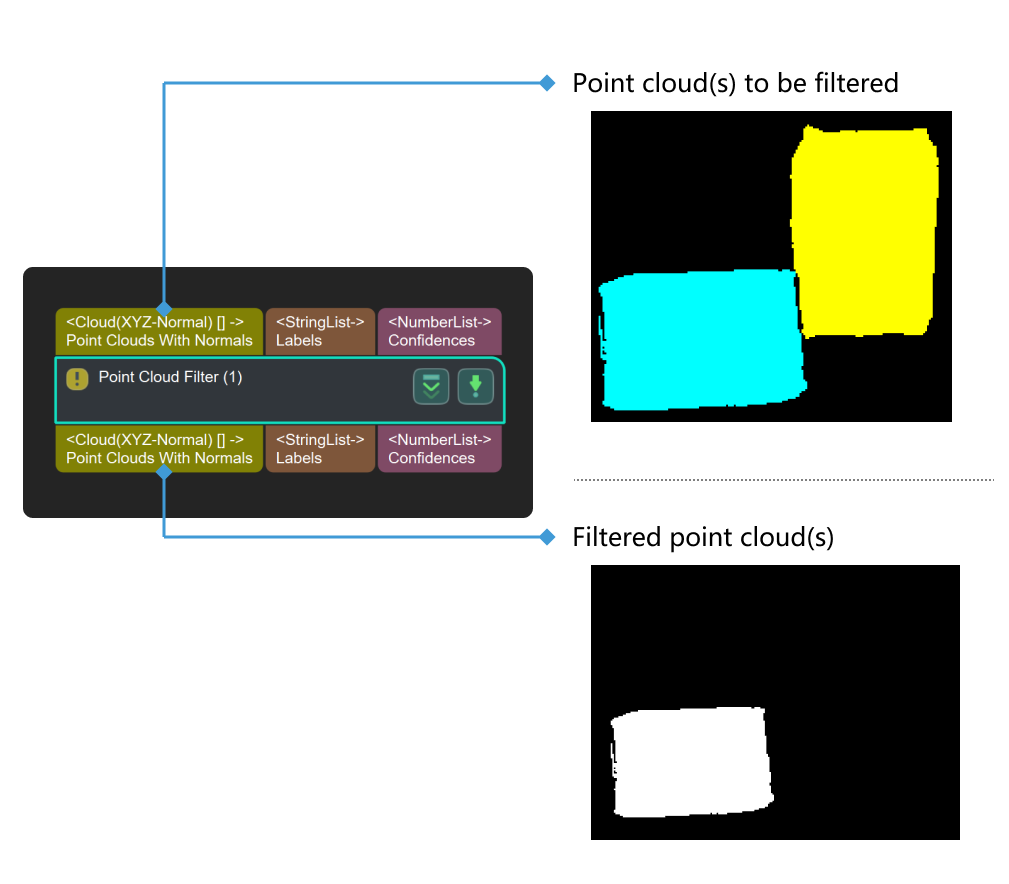
Point Cloud Filter
|
This Step is outdated. Please use the new Step Validate Point Clouds instead. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net. |
Usage Scenario
Usually used to filter point clouds based on the number of points (setting the Filter parameter to CloudCapacityFilter).
Parameter Description
Filter Type
Instruction: This parameter is used to select the filter type. There are four types of filter, i.e., CircleCloudsFilter, CloudCapacityFilter, RecCloudsFilter, and SolidCloudsFilter.
Default Value: CircleCloudsFilter
Suggested value: To set according to the actual scenarios.
List of Values: CircleCloudsFilter, CloudCapacityFilter, RecCloudsFilter, and SolidCloudsFilter.
CircleCloudsFilter
CircleCloudsFilter could transfer the 3D point clouds into 2D mask image to get the contour of the mask and calculate the circularity and perimeter in order to filter out the point clouds that are not covered in the range.
- Contour Retrieval Mode
-
Description: This parameter is used to select the contour retrieval mode and two kinds of mode are included:RETR_EXTERNAL and RETR_HULL.
Default value: RECT_EXTERNAL
Suggested Value: To set according to the actual scenarios.
- Min Area Threshold
-
Description: This parameter is the lower limit of the area of the circle clouds (in pixel).
Default value: 100
Suggested value: Set according to the actual scenarios.
- Max Area Threshold
-
Description: This parameter is the upper limit of the area of the circle clouds (in pixel).
Default value: 1000
Suggested value: Set according to the actual scenarios.
- Min Circularity
-
Description: This parameter is the lower limit of the circularity of the circle.
Default value: 0.5
Suggested value: Set according to the actual scenarios.
- Max Circularity
-
Description: This parameter is the upper limit of the circularity of the circle.
Default value: 1
Suggested value: Set according to the actual scenarios.
- Min Convexity
-
Description: This parameter is the lower limit of the convexity of the circle.
Default value: 0.8
Suggested value: Set according to the actual scenarios.
- Max Convexity
-
Description: This parameter is the upper limit of the convexity of the circle.
Default value: 1
Suggested value: Set according to the actual scenarios.
- Min Inertia
-
Description: This parameter is the lower limit of the ratio between the length of short axis and the length of long axis.
Default value: 0.6
Suggested value: Set according to the actual scenarios.
- Max Inertia
-
Description: This parameter is the upper limit of the ratio between the length of short axis and the length of long axis.
Default value: 1
Suggested value: Set according to the actual scenarios.
CloudCapacityFilter
CloudCapacityFilter could filter out the point clouds based on the number of the point in the point clouds.
- Min Number of Points
-
Description: This parameter is the lower limit of the number of the point in the point clouds.
Default value: 6000
Suggested value: Set according to the actual scenarios.
Valid range: (0, maxPointsNum)
- Max Number of Points
-
Description: This parameter is the upper limit of the number of the point in the point clouds.
Default value: 360000
Suggested value: Set according to the actual scenarios.
Valid range: (minPointsNum, +∞)
RecCloudsFilter
- Min Rectangularity
-
Description: This parameter is the lower limit of the rectangularity of the rectangle. The rectangularity equals the ratio of the actual area of the point cloud to the area of the minimum circumscribed rectangle.
Default value: 0.9000
Suggested value: Set according to the actual scenarios.
SolidCloudsFilter
- Ratio
-
Description: This parameter is the upper lower of the size ratio between the point cloud and the solid.
Default value: 0.9000
Suggested value: Set according to the actual scenarios.
Valid range: (0, 1]
- Remove Solid Clouds
-
Description: This parameter is used to decides whether to filter out the solid point clouds or not. Solid points clouds will be removed once this parameter is selected, or else hollow point clouds will be removed.
Default value: selected.
Suggested value: Set according to the actual scenarios.