Calc Calibration Board Pose and Check Camera Intrinsic Parameters
Function
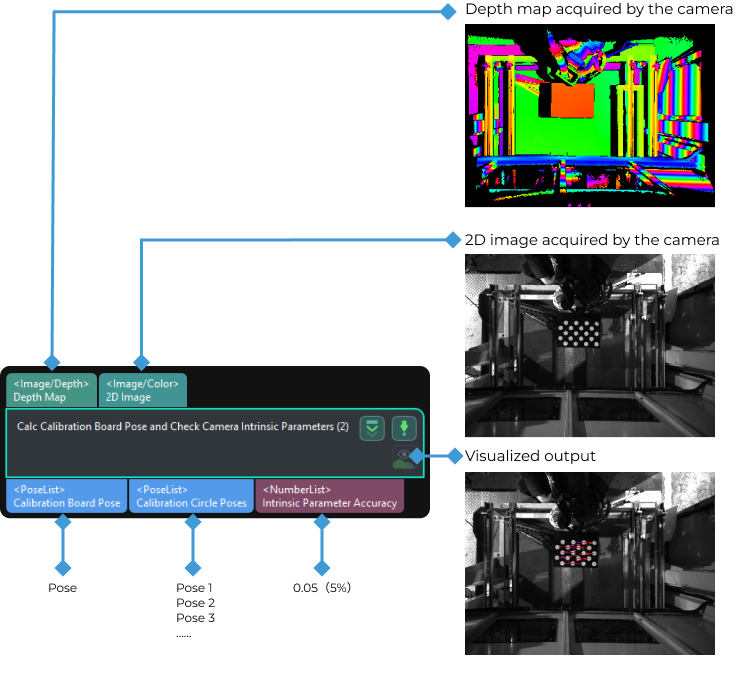
This Step can detect the calibration circle centers on the 2D image, and then compute the pose of the calibration board and the poses of calibration circles according to the camera intrinsic parameters and the input depth map. In addition, this Step can be used to estimate the accuracy of the camera’s intrinsic parameters based on the calibration circle poses.
|
The calibration circle pose indicates the pose of the center of the calibration circle on the calibration board. |
Usage Scenario
This Step is usually used for obtaining the pose of the calibration board and check the camera’s intrinsic parameters.
Parameter Description
- Calibration Board Model
-
Description: This parameter is used to set the model of the calibration board.
Tuning recommendation: Please set this parameter according to the actual calibration board models in use.
- 2D ROI
-
Description: This parameter is used to set the 2D ROI.
Tuning recommendation: Click Open the editor to set the 2D ROI.
- Enable Hand-Eye System Compensation
-
Description: If the hand-eye (robot and camera) system encounters an accuracy problem during the calibration process, you can enable the hand-eye system compensation to increase the system’s accuracy. Once this option is selected, the compensation parameters will be used to reduce the error.
Default value: selected.