Notify
Usage Scenario
This Step is usually used in scenarios where an external device is required for the communication.
Parameter Description
General Parameters of Non-Move Steps
Skip Execution
| None |
Default setting. Do not skip the current Step. |
| Simulation only |
Skip the current Step during simulation. The exit port is specified by Out Port When Skip. |
| Always |
Skip the current Step when the project is simulating or running. The exit port is specified by Out Port When Skip. |
| Instruction |
When Simulation only or Always is selected, the current Step will be skipped and the subsequent Step will be executed when running the project. If this parameter is set to None in “Check DI” Step in the project, and there is no external input signal during simulation, the project will be stopped when executing to this Step. In this case, setting the parameter to Simulation only or Always enables the simulation to continue. |
Out Port When Skip
This parameter will take effect when Skip Execution is set to Simulation only or Always. It specifies the exit port when skipping a Step.
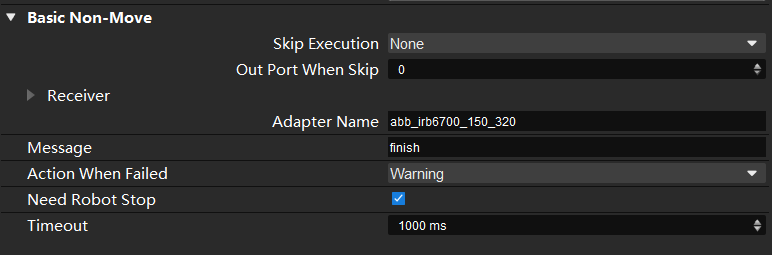
Adapter Name
This parameter specifies the Adapter that will receive the message from this Step. If there are multiple Notify Steps in the project, the Adapter Name set in the Steps should be the same.
Message
The customized message. The Adapter executes different logic according to the content of the message. For example, you can set the message to finish if the branch operation ends.
Action When Failed
Description: This parameter specifies the action of the software when the notification message is not sent successfully.
Value:
-
Warning: Send a warning message (default value).
-
Retry: Try to re-send the message.
-
Throw: Discard the notify Step.
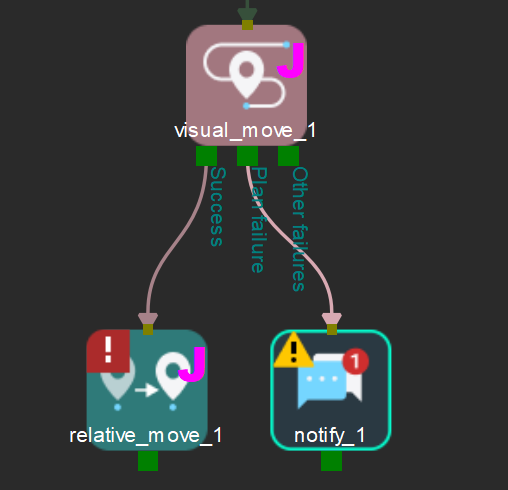
Application Examples
As shown in the figures below, an Adapter Name is set, and a finish message will be sent to the Adapter if the software fails to plan a path.