Others
This functional panel contains execution settings, Step collecting settings, Singularity detection, and Global JPs constraints.
Others
-
Skip waypoints approximate to others
When two waypoints are close to each other, only one waypoint is sent to the robot.
-
Only use default workobject configuration
After this option is enabled, the default workobject configurations will be used even when an object label is received.
-
Robot service timeout
The timeout period for communication between Mech-Viz and the robot. This feature does not work for move-type Steps and the “Transfer Control” Step. The default timeout period is 1000 ms.
Singularity detection
Purpose of Singularity Detection
If the robot reaches the point of a singularity, it may not be able to execute certain linear motion commands, causing the robot’s alarm to activate and leading to a halt in production. The singularity detection function can provide early warnings and attempt to avoid singularities in the path planning process, ensuring smoother robot motion and reducing the occurrence of system alarms and anomalies, which helps maintain production continuity.
Singularity Detection Method
Once the Max velocity, Reduction ratio, and range of the JPs are specified under Singularity detection in the Others functional panel of Mech-Viz, the software can detect singularities automatically. There are four options for the Detection method.
-
Do not detect
-
Detect velocity of each joint
-
Detect angle of specified joint
-
Detect velocity of each joint and angle of specified joint
| The singularity detection only takes effect for move-type Steps in which the motion type is set to Linear move. |
Do not detect
-
Description
Do not enable singularity detection in the software.
-
Instruction
Select Do not detect in the drop-down list of the Detection method parameter.
Detect velocity of each joint
-
Description
When the detected velocity of any joint exceeds the specified Max velocity, the velocity set in the move-type Step will be reduced according to the Reduction ratio, and the singularity detection will be performed again. If the reduced velocity is less than the set Max velocity, the robot will move at the reduced velocity in the corresponding Step. If the reduced velocity still exceeds the set Max velocity, the software will determine that a singularity will occur when the robot moves, and the robot cannot reach the desired position.
Reduced velocity = Original velocity × Reduction ratio -
Instruction
-
Select Detect velocity of each joint in the drop-down list of the Detection method parameter.
-
Set Max velocity and Reduction ratio.
-
Detect angle of specified joint
-
Description
When the robot is moving linearly, Mech-Viz will detect whether the angle of the specified joint falls within the set range specified by the Angle lower limit and Angle upper limit. If the joint angle falls within the set range, the software will determine that a singularity will occur when the robot moves, and the robot cannot reach the desired position.
-
Instruction
-
Select Detect angle of specified joint in the drop-down list of the Detection method parameter.
-
Specify the joint to be detected.
-
Set the Angle lower limit and Angle upper limit.
-
Detect velocity of each joint and angle of specified joint
-
Description
Detect whether the angular velocity of each joint exceeds the set “Max velocity” and whether the angle of the specified joint falls within the set angle range in a linear movement at the same time. Please refer to the description for the “Detect velocity of each joint” and “Detect angle of specified joint” above.
When the robot does not meet any of the requirements of the above two options, the software will determine that a singularity will occur when the robot moves, and the robot cannot reach the desired position.
-
Instruction
-
Select Detect velocity of each joint and angle of specified joint in the drop-down list of the Detection method parameter.
-
Refer to the description for the “Detect velocity of each joint” and “Detect angle of specified joint” options above, and set Max velocity, Reduction ratio, Select joint, Angle lower limit, and Angle upper limit.
-
Global JPs Constraints
|
For move-type Steps, if the JPs Constraint parameters are set to Auto, the settings of Mech-Viz will take effect. Otherwise, the settings in the move-type Steps will take effect. |
-
No shoulder flip/No elbow flip/No wrist Flip
You can choose to reduce unnecessary rotation of the robot While Holding objects or during the Entire Execution.
However, setting the shoulder/elbow/wrist all to “no rotation” is not necessarily the best choice. An example is shown in the figure below.
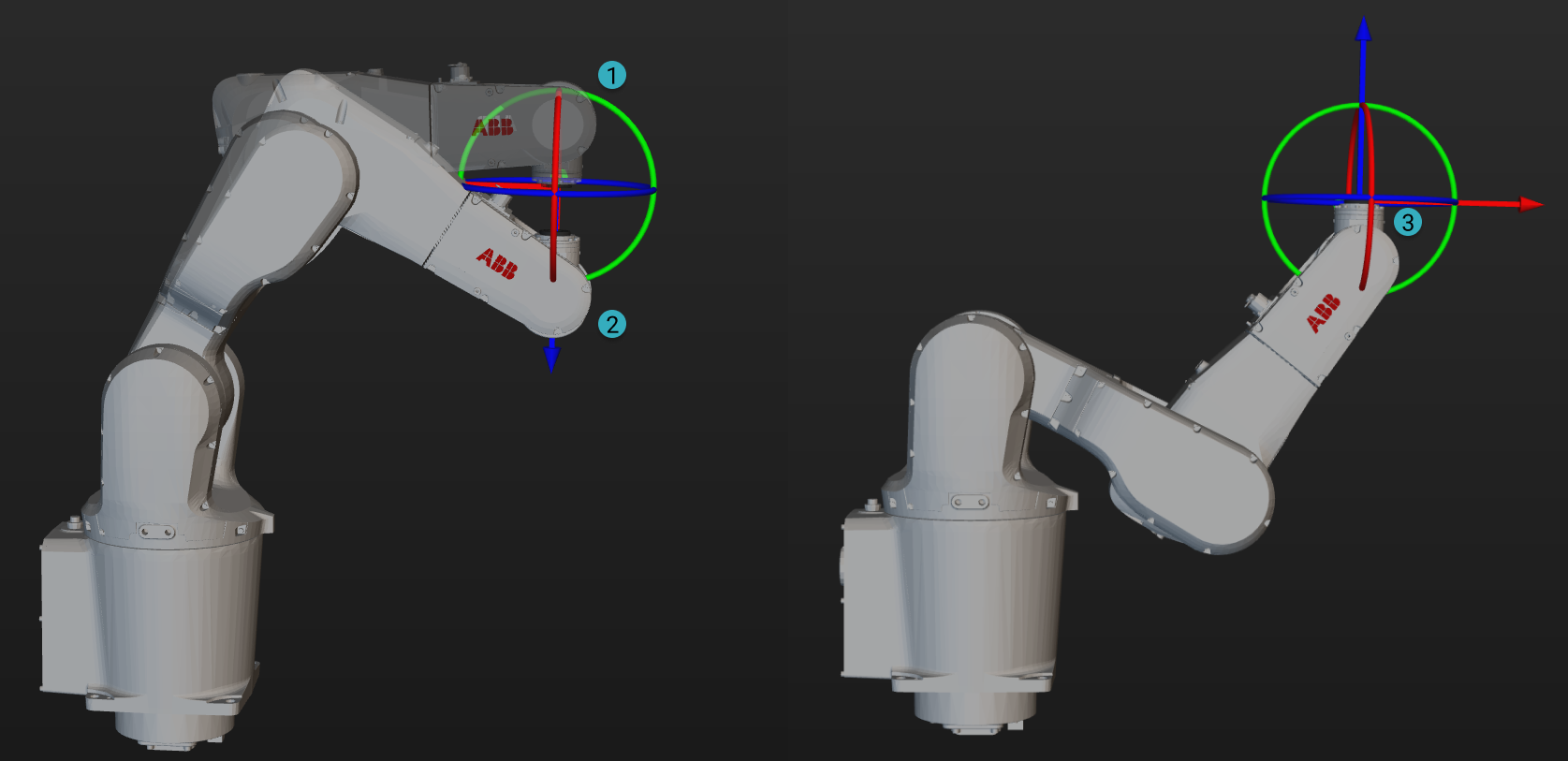
When the robot needs to move from position 1 to position 2 and “No Joint Flip” is set, unnecessary motion is required to reach that point, and the robot may end in position 3. In this case, only No Shoulder Flip and No Elbow Flip need to be set.