Transform Poses for Truss
Function
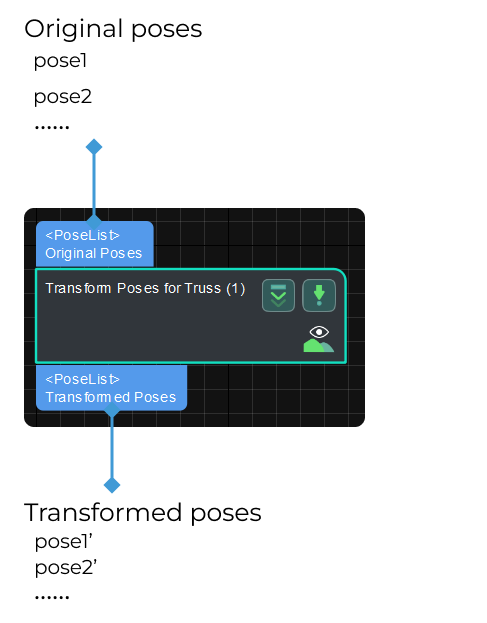
This Step is used to transform the input poses to the camera reference frame or the truss system reference frame and then output the transformed poses.
Usage Scenario
This Step is designed to transform the reference frame of poses in automated truss system projects.
|
If you are using a robot other than the automated truss system, please use the Transform Poses Step. If you use the wrong transform Step, the transformed poses will be incorrect and therefore incorrect pick points will be output. |
Parameter Description
- Transformation Type
-
Parameter description: This parameter is used to select the type of pose transformation.
Options: CameraToRobot, RobotToCamera.
-
CameraToRobot: Assuming that the object pose in the camera reference frame is Pose 1, when the transformation type is CameraToRobot, the transformed pose Pose2 in the truss system reference frame will be output. Please refer to the tuning example for the corresponding result.
-
RobotToCamera: Assuming that the object pose in the truss system reference frame is Pose 1, when the transformation type is RobotToCamera, the transformed pose Pose2 in the camera reference frame will be output. Please refer to the tuning example for the corresponding result.
Default setting: CameraToRobot.
-